Avastage Orin Nano Mini Pickerbot and Drop Roboti kasutusjuhend, mis sisaldab üksikasjalikke tootespetsifikatsioone ja kasutusjuhiseid sujuva robotabi tagamiseks. Avastage uuenduslikke omadusi ja võimalusi oma roboti jõudluse optimeerimiseks.
Avastage N10-M10 roboti haridusliku programmeeritava mobiilroboti põhjalik kasutusjuhend, mis sisaldab üksikasjalikke tootespetsifikatsioone, kasutusjuhiseid ja põhikomponente. Hankige ülevaade ROS-kontrolleritest, LiDAR-ist ja muust ROBOWORKSi informatiivsest juhendist.
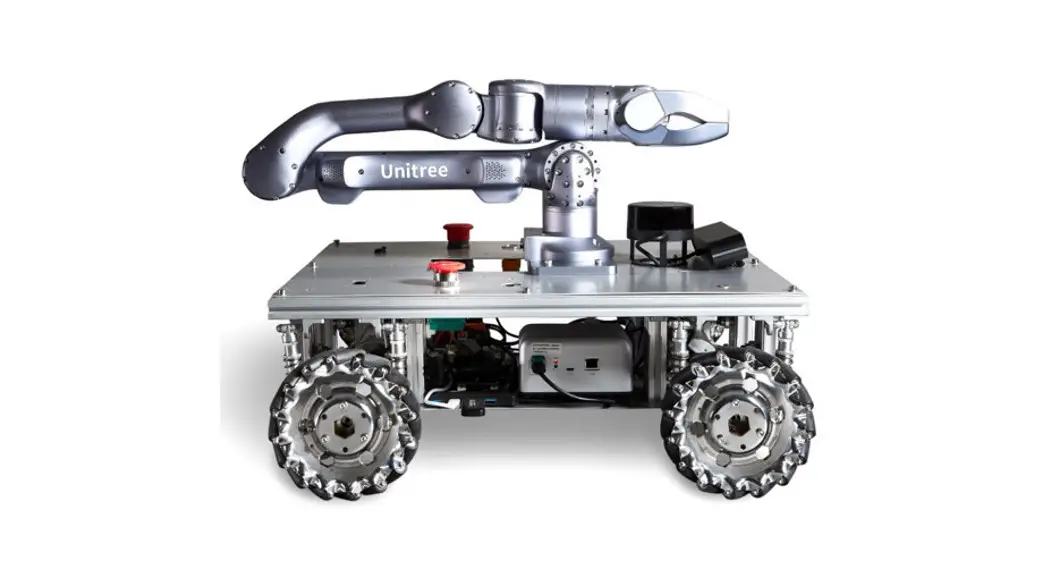
Lisateavet Pickerbot Pro Pick and Drop mobiilse roboti kohta Mecanum Wheels'il, millel on Unitree Z1 Pro robotkäsi ja NVIDIA Jetson Orin kontroller. Uurige selle uuendusliku robotsüsteemi tehnilisi andmeid, tarkvara üksikasju ja tõrkeotsingu nõuandeid.
Avastage N10 Robot Educational Programmable Mobile Robot seeria spetsifikatsioonid ja funktsioonid, sealhulgas mudelid Rosbot 2, Pro ja Plus. Lisateavet aku tööea, roolisüsteemi, ROS-kontrollerite, STM32 plaadi ja muu kohta leiate sellest põhjalikust kasutusjuhendist. Juhtige roboteid hõlpsalt iOS-i ja Androidi rakenduse abil Bluetoothi või Wifi kaudu.
Avastage Robofleet Multi-Agent Algorithms kasutusjuhendi abil, kuidas rakendada robotite koordineerimiseks ja suhtlemiseks mitme agendi algoritme. Lisateave mitme agendi side ja automaatse WiFi-ühenduse seadistamise kohta ROS-is. See põhjalik juhend, mille on koostanud Wayne Liu ja Janette Lin, annab ülevaate ROBOWORKSi süsteemi tõhusast kasutamisest.
Tutvuge Pickerbot Pro Pick and Drop mobiilse roboti põhjaliku kasutusjuhendiga, mis on varustatud Unitree Z1 Pro robotvarrega, millel on 6 vabadusastet ja 3 kg kandevõime. Avastage üksikasjalikud spetsifikatsioonid, tarkvarajuhised ja integreerimisjuhised optimaalse jõudluse tagamiseks.
Tutvuge Mini 4WD Rosboti ja selle variatsioonidega – Rosbot Pro ja Rosbot Plusiga. Avastage nende spetsifikatsioonid, kasutusjuhised ja sobivus erinevate projektide ja rakenduste jaoks. Sellest põhjalikust kasutusjuhendist saate ülevaate ROS-kontrolleritest, andurisüsteemidest, aku kasutusajast ja muust.
Tutvuge Robofleet Orin Nano x3 ROS Roboti põhjaliku kasutusjuhendiga, mis sisaldab spetsifikatsioone, toote kasutusjuhiseid, mitme agendi algoritme, side seadistamist ja KKK-sid.
Avastage Pickerbot Pro, Roboworksi mitmekülgne teadus- ja arendustegevuse robootikaplatvorm. See kasutusjuhend kirjeldab üksikasjalikult selle Unitree Z1 Pro robotkätt, NVIDIA Jetson Orini arvutusvõimendust, Orbbec kaamerat ja nelikveolist šassiid põllumajanduse, logistika ja teadusuuringute rakenduste jaoks.
Põhjalik kasutusjuhend Roboworks Rosboti kohta, mis on mitmekülgne ROS-toega robootikaplatvorm hariduse, teadus- ja arendustegevuse jaoks. Üksikasjad spetsifikatsioonide, komponentide, andurite, toitehalduse ja ROS 2 kiirjuhendi kohta.
Põhjalik kasutusjuhend Pickerbot Mini kohta, mis on ROS-il põhinev paigutamisrobot ja on mõeldud robootikauurijatele, õpetajatele, üliõpilastele ja arendajatele. Hõlmab tootespetsifikatsioone, ROS-i kontrollereid, sensorisüsteeme, riistvarakomponente, energiahaldust, kaugjuhtimist, MIROS-i visuaalset programmeerimist, ROS 2 kiirkäivitust ja eelinstallitud pakette.
Põhjalik kasutusjuhend Roboworks Rosboti kohta, mis on mitmekülgne robotiplatvorm, mis on loodud ROS-i arendajatele, õpetajatele ja õpilastele. Üksikasjad spetsifikatsioonide, komponentide ja variatsioonide, sh Rosbot Mini, Pro ja Plus kohta.
See põhjalik kasutusjuhend kirjeldab üksikasjalikult Robofleeti süsteemi ja ROS-paketti `wheeltec_multi`, mis on mõeldud mitme roboti formatsiooni täiustatud juhtimiseks. See hõlmab olulisi teemasid, sealhulgas ROS-kommunikatsiooni seadistamist, aja sünkroniseerimist, takistuste vältimist ja tööprotseduure platvormidel nagu Jetson Nano ja Raspberry Pi, võimaldades kasutajatel kiiresti juurutada mitme agendiga robotiprojekte.