![]()
Pickerbot Pro kasutusjuhend
Pange tähele, et näidatud pildid on illustratiivse tähendusega*.
Autorid: Wayne Liu, Reilly Smithers
3. juuli 2024
KOKKUVÕTE
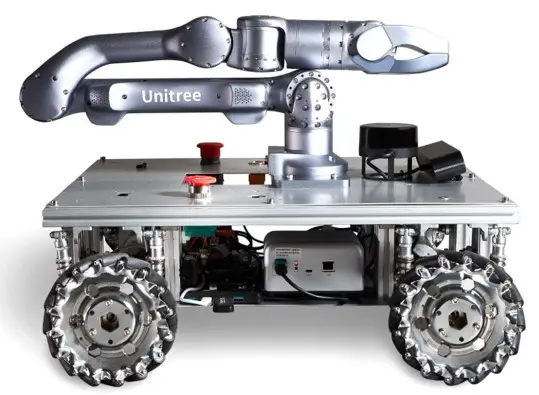
Pickerbot Pro on mitmekülgne teadus- ja arendustegevuse robootikaplatvorm, mida saab kasutada mitmesugustes rakendustes nii välitingimustes, nagu põllumajandus, kaevandamine ja ehitus, kui ka siseruumides, sealhulgas roboti abil logistika, otsingu- ja päästedemonstratsioonid ning kaardistamine.
1 mm ulatuse ja 740 kg kandevõimega Unitree Z3 Pro robotvarrega Pickerbot Pro pakub muljetavaldavat liigendust 6 vabadusastmega ning jõu tagasiside ja kokkupõrke tuvastamise võimalusi.
NVIDIA Jetson Orini seeria ühe tahvliarvuti (Nano või NX variant) toiteallikana pakub täiustatud arvutinägemise ja masinõppe ülesandeid võimsa graafika või paralleelse andmetöötluse funktsioonidega CUDA abil, säilitades samas kompaktse ja kerge disaini.
Pickerbot Pro on varustatud Orbbec 3D Astra kaameraga, mis pakub sügavuse tuvastamise, objektide jälgimise ja liigutuste tuvastamise võimalusi.
Pickerbot Pro on ehitatud tugevale, kuid kergele šassiile ning sellel on sõltumatu vedrustusega nelikveosüsteem, mis parandab navigeerimist ebatasasel maastikul. Suured mecanumi rattad tagavad täpse mitmesuunalise liikumise, kuid samas suure haarduvuse.
Põhikomponendid ja riistvara
1.1 ROS 2 kontroller: NVIDIA Jetson Orin (NX 8GB või Nano 4GB)
Sisseehitatud Jetson Orini ühe pardaarvuti pakub Pickerbot Pro võimsat manustatud andmetöötlust. Kaasas 128 GB SSD, Inteli juhtmevaba kaart ja sisseehitatud antennid, HDMI, neli USB-porti (millest 3 on USB 3.0), Ethernet ja USB-C. Alalisvoolu tünnipistik plaadi toiteks, kasutades 9–19 V pinget. Sisseehitatud GPIO kontaktid kasutavad sama põhipaigutust nagu populaarsed Raspberry Pi ühe pardal olevad arvutid, alustades tihvtist nr 1 välisreas, Etherneti pordi kõrval. Samuti võimaldavad kaks CSI-kaamera pistikut funktsionaalsust koos Raspberry Pi kaubamärgiga ja sarnaste väikese kujuga kaameratega.
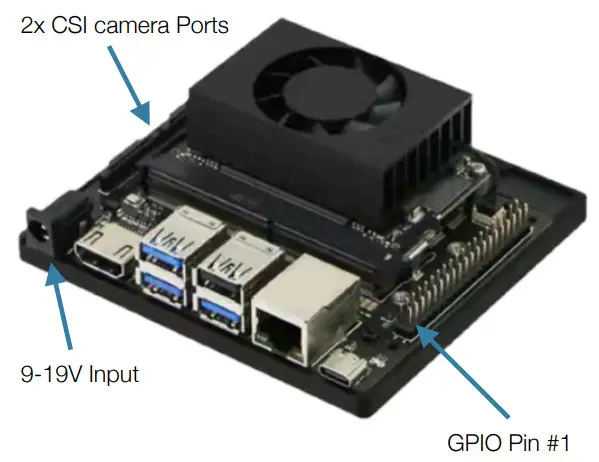
Eelinstallitud tarkvara sisaldab ROS 2 Humble, Ubuntu 22.04 ja NVIDIA Jetpack, mis võimaldab Orini platvormi kõiki võimalusi.
Märkus. Šassii kontrolleri ja muude roboti komponentidega ühilduvuse säilitamiseks ei soovita me Jetson Orinit erineva tarkvaraga flashida. Täpsemate kasutusjuhtude jaoks võtke ühendust Roboworksi toega.
1.2 Andursüsteem: LiDAR ja sügavuskaamera
Pickerbot Pro on varustatud Leishen M10 LSLiDAR-iga. Maksimaalne 30 m tuvastusulatus ja 12 Hz pöörlemissagedus ning kõrge signaali-müra suhe, mis välistab vajaduse täiendava filtreerimise järele. See integreerub sujuvalt, pakkudes suurepäraseid kaardistamis- ja navigeerimisvõimalusi.
Lisaks on Pickerbot Pro varustatud Orbbec Astra sügavuskaameraga, mis on RGB sügavuskaamera. See kaamera on optimeeritud paljudeks kasutusteks, sealhulgas liigutuste juhtimiseks, luustiku jälgimiseks, 3D-skaneerimiseks, objektide tuvastamiseks ja punktipilve arendamiseks ROS 2 abil.
| Sügavuse eraldusvõime | RGB eraldusvõime | RGB tunnetusnurk | Sügavus FPS | RGB kaadrisagedus | Sügavuskaadri sagedus | Sügavusvahemik |
| 640 × 480 | 640 × 480 | 63.1 × 49.4 ° | 58 × 45.5 ° | 30 kaadrit sekundis | 30 kaadrit sekundis | 0.6-4 m |
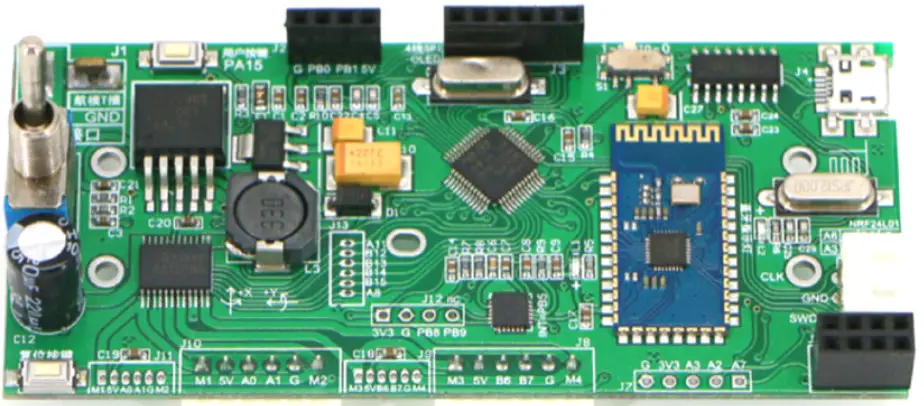
1.3 STM32 juhtplaat (mootori juhtimine ja IMU)
Šassii ja mootori juhtimiseks on Pickerbot Pro-l STM32 juhtplaat. See plaat tagab väikese energiatarbimise, täpse mootori juhtimise, OLED-näidikud mootorite jälgimiseks ja inertsiaalse mõõtühiku (IMU). Seda saab konfigureerida spetsialiseeritud toimimiseks või kodeerija tagasiside võimaldamiseks Jetson Orini kontrollerile. Tarkvarapakettide Keil ja FlyMCU kasutamine STM32F103 kompileerimiseks ja sellele järgnevaks vilkumiseks.
| STM32F103RC | Omadused |
| Tuum | ARM32-bitine Cortex -M3 CPU Max kiirus 72 MHz |
| Mälestused | 512 KB välkmälu 64 kB SRAM |
| Kell, lähtestamine ja tarnehaldus | 2.0 kuni 3.6 V rakenduste toide ja sisendid |
| Võimsus | Magama. Stopp- ja ooterežiimid V-toide RTC-le ja varuregistritele BAT |
| DMA | 12-kanaliline DMA kontroller |
| Silumisrežiim | SWD ja JTAG liidesed Cortex-M3 Embedded Trace Macrocell |
| I/O pordid | 51 I/O porti (kaardistatav 16 välise katkestusvektoriga ja 5 V tolerantsed) |
| Taimerid | 4 × 16-bitised taimerid 2 x 16-bitise mootori juhtimise PWM taimerit (hädaseiskamisega) 2 x valvekoera taimerit (sõltumatu ja aken) SysTicki taimer (24-bitine allaloendur) 2 x 16-bitist põhitaimerit DAC-i juhtimiseks |
| Sideliides | USB 2.0 täiskiirusega liides SDIO liides CAN-liides (2.0B aktiivne) |
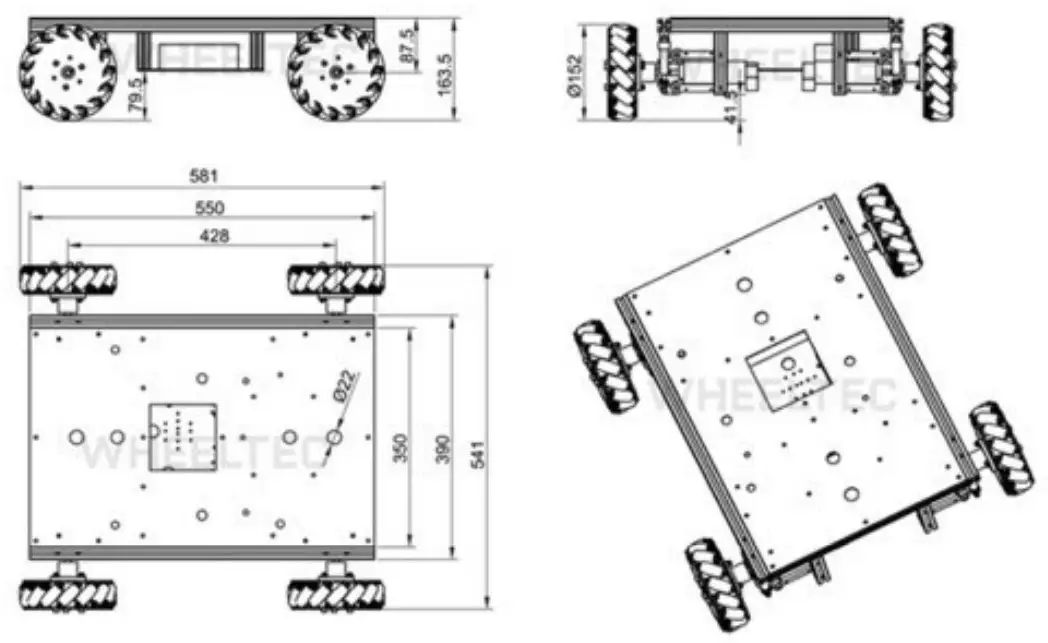
1.4 Šassii üleview ja Aku valikud
Pickerbot Pro on varustatud mitmesuunaliste Mecanum ratastega, millest igaühel on 45-kraadised nihkerullid, mis hõlbustavad liikumist igas suunas. Oluline on märkida, et neid rattaid tarnitakse paarikaupa, kusjuures iga paari rullid on erinevalt orienteeritud. Paigaldamise ajal robotile veenduge, et diagonaalselt vastakuti asetsevate rataste rullikud on suunatud samas suunas. Kui robot liigub ootamatult, pöörake lihtsalt rattapaare ümber.
Considerations must be made when increasing battery capacity. The Pickerbot Pro comes standard with a 5000 mAh battery and can be upgraded to 10,000 or 20,000 mAh options for an additional cost. The 20,000 mAh battery is too large to fit within the chassis of the Pickerbot Pro and can only be installed on top of the robot chassis. Please refer to the table below for weight and size parameters.
| Aku parameeter | Omadused | ||
| 5000 mAh | 10000 mAh | 20000 mAh | |
| Aku mahttage | 22.2V | 22.2V | 22.2V |
| Suurus | 124 * 71 * 42 mm | 124 * 71 * 71 mm | 156 * 122 * 71 mm |
| Toitelaadija | DC 5.5 laadimispistik T-kujuline tühjenduskork |
DC 5.5 laadimispistik T-kujuline tühjenduskork |
DC 5.5 laadimispistik T-kujuline tühjenduskork |
| Esitus | 15A pidev d laadimine |
30A pidev tühjenemine | 60A pidev tühjenemine |
| Kaal | 0.66 kg | 1.25 kg | 2.4 kg |
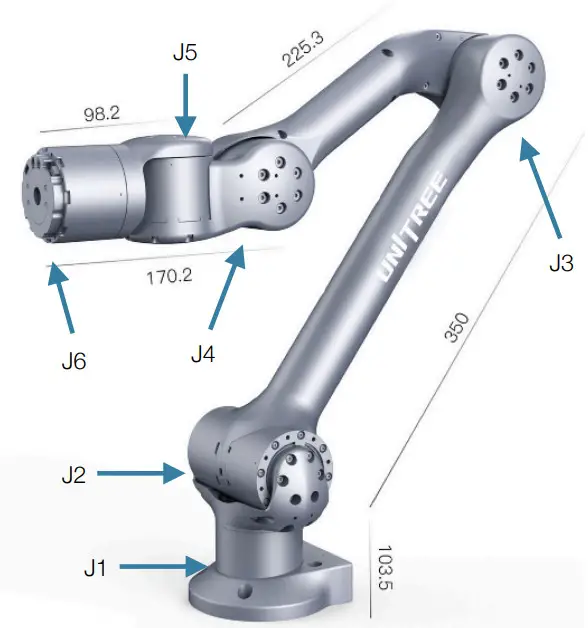
1.5 Unitree Z1 Pro robotvars
Pickerbot Pro sisaldab Unitree Z1 Pro robotkäepidet, mis pakub muljetavaldavat liigendust 6 vabadusastmega ja 740 mm ulatusega. Palun vaadake allolevat liitparameetrite tabelit, et kohandada kinemaatikat vastavalt teie konkreetsetele nõuetele.
| Ühine | Liikumisulatus | Maksimaalne kiirus | Max Torque |
| J1 | ±150° | 180°/s | 33 N·m |
| J2 | 0-180° | 180°/s | 33 N·m |
| J3 | -165°-0 | 180°/s | 33 N·m |
| J4 | ±80° | 180°/s | 33 N·m |
| J5 | ±85° | 180°/s | 33 N·m |
| J6 | ±160 | 180°/s | 33 N·m |
| Parameeter | Z1 Pro |
| Kaal | 4.5 kg |
| Kasulik koormus | 3 kg |
| Jõua | 740 mm |
| Korratavus | ~0.1 mm |
| Toiteallikas | 24V |
| Liides | Ethernet |
| Ühilduv operatsioonisüsteem | Ubuntu |
| Maksimaalne võimsus | 500W |
| Jõuga tagasiside | Jah |
Tarkvara ja alustamine
2.1 ROS 2 Quick Start
Kui robot esimest korda sisse lülitatakse, juhib seda vaikimisi ROS. See tähendab, et STM32 šassii kontrolleri plaat aktsepteerib ROS 2 kontrolleri – Jetson Orini käske.
Esialgne seadistamine on kiire ja lihtne, looge hostarvutist (soovitatav Ubuntu Linux) ühendus roboti Wi-Fi levialaga. Vaikimisi on parool "dongguan".
Järgmisena looge Linuxi terminali kaudu SSH-ga ühendus robotiga, IP-aadress on 192.168.0.100, vaikeparool on dongguan.
![]()
Terminalijuurdepääsuga robotile saate navigeerida ROS 2 tööruumi kausta jaotises "wheeltec_ROS 2" Enne testprogrammide käivitamist navigeerige saidile wheeltec_ROS 2/turn_on_wheeltec_robot/ ja leidke asukoht wheeltec_udev.sh – seda skripti tuleb käivitada, tavaliselt ainult üks kord. et tagada välisseadmete õige konfiguratsioon.
Nüüd saate testida roboti funktsionaalsust, käivitada ROS 2 kontrolleri funktsionaalsus, käivitada: "roslaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch"
![]()
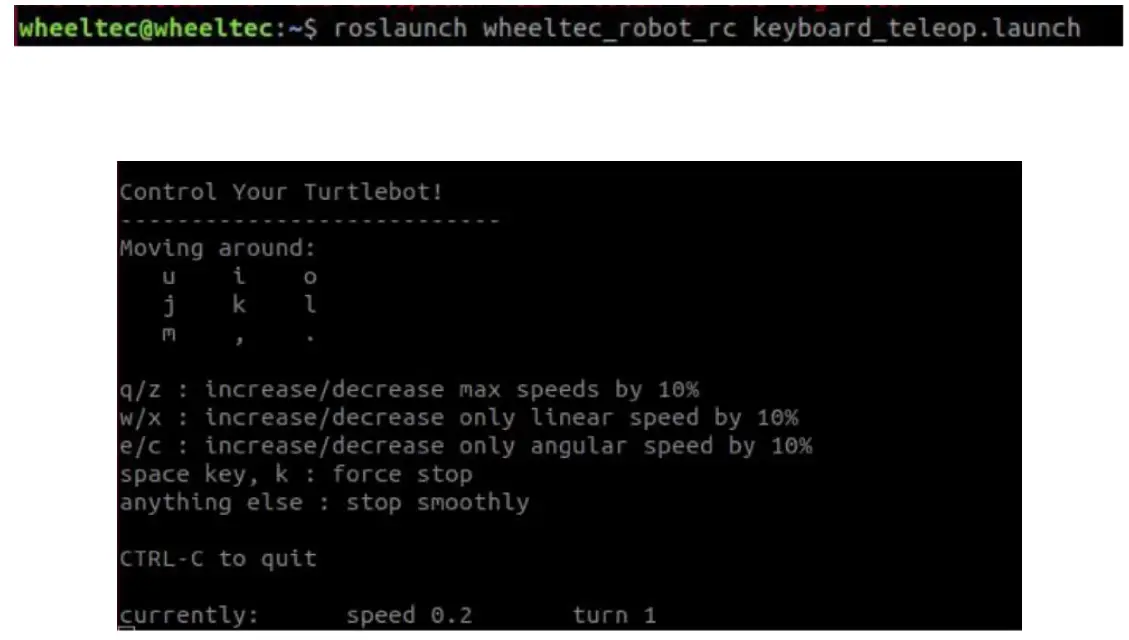
Teises terminalis saate šassii juhtimise kinnitamiseks kasutada sõlme keyboard_teleop, see on populaarse ROS 2 Turtlebot ex modifitseeritud versioon.ample. Sisestage: "roslaunch wheeltec_robot_rc keyboard_teleop.launch"
2.2 Eelinstallitud ROS 2 paketid šassii jaoks
Allpool on toodud järgmised kasutajale orienteeritud paketid, kuigi teised paketid võivad olla olemas, on need ainult sõltuvused.
turn_on_wheeltec_robot
See pakett on ülioluline roboti funktsionaalsuse ja šassiikontrolleriga suhtlemise võimaldamiseks.
ROS 2 ja kontrolleri konfigureerimiseks tuleb igal alglaadimisel kasutada esmast skripti "turn_on_wheeltec_robot.launch".
wheeltec_rviz2
Sisaldab Pickerbot Pro jaoks kohandatud konfiguratsiooniga rvizi käivitamiseks käivitusfaile.
wheeltec_robot_slam
SLAM-i kaardistamise ja lokaliseerimise pakett kohandatud konfiguratsiooniga Pickerbot Pro jaoks.
wheeltec_robot_rrt2
Kiiresti uuriv juhuslik puualgoritm – see pakett võimaldab Pickerbot Pro-l planeerida tee soovitud asukohta, käivitades uurimissõlmed.
wheeltec_robot_klaviatuur
Mugav pakett roboti funktsionaalsuse valideerimiseks ja juhtimiseks klaviatuuri abil, sealhulgas kaugarvutist.
wheeltec_robot_nav2
ROS 2 Navigation 2 sõlmepakett.
wheeltec_lidar_ROS 2
ROS 2 Lidar pakett Leishen M10/N10 konfigureerimiseks.
wheeltec_joy
Juhtkangi juhtpakett, sisaldab juhtkangi sõlmede käivitusfaile.
simple_follower_ROS 2
Põhilised objektide ja joonte järgimise algoritmid, kasutades kas laserskaneerimist või sügavuskaamerat.
ROS 2_astra_camera
Astra sügavuskaamera pakett draiverite ja käivitusfailidega.
Robotkäe integreerimine
3.1 Robotkäepideme juhtmestiku komponendid
Unitree Z1 soovitatav juhtmestik
Allpool on toodud Unitree Z1 õla soovitatavad juhtmestiku komponendid. Pärast toitelülitit peaks olema saadaval naissoost 2-pooluseline dekaanpistik. Ühendage komponendid järjestikku. Veenduge, et pistiku +/GND ühendused ühtivad. Tera kaitsmehoidik peaks asuma positiivsel elektriliinil.
| Komponent | Kogus |
| Meeste dekaani stiilis 2-pooluseline pistik | x1 |
| Isane xt60 stiilis 2-pooluseline pistik | x1 |
| Inline tera kaitsmehoidja | x1 |
| 14 AWG 2-sooneline kaabel | x1 |
| 7.5 Terakaitse | x1 |
Kuna käel on ainult suhtelised kodeerijad, tuleb see igal käivitamisel lähtestada samasse asendisse. Võib osutuda kasulikuks kinnitada kaablisse järjestikku lüliti, et õla lähtestamiseks hõlpsasti sisse ja välja lülitada.
MÄRKUS. Unitree dokumentatsioon ütleb, et õla võimsus on 20 A. See on vale. Iga toiteallika jaoks on järjestikku kinnitatud 10A SMD-kaitse. Kui kasutate 7.5A kaitset, siis see põleb enne 10A SMD-kaitset läbi ja seda on oluliselt lihtsam asendada.
MÄRKUS. Süsteemi unitree Z1 õla lisaraskuse tõttu ei suuda esivedrud kätt toetada. Varuvedrude asemel võib leida ja kasutada 70 mm * 16 mm survevedrusid. Teise võimalusena võib kasutada suuri amortisaatorit ümbritsevaid vedrusid.
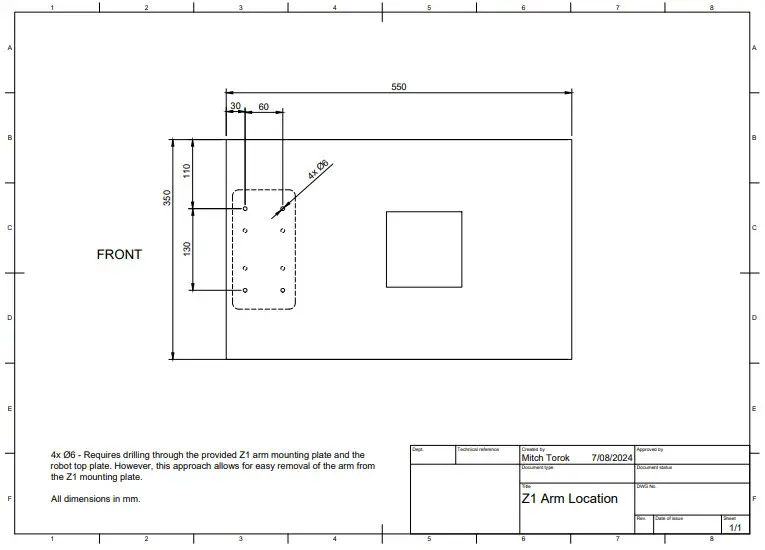
3.2 Roboti käe kinnitusjoonised
3.3 Sample kood robotkäe jaoks
Selle kasutusjuhendi koostamise ajal toetab Unitree SDK for Z1 Pro ainult ROS 1 Melodic või Noetic.
Pickerbot Pro tootemeeskond on välja töötanud sample kood ROS 2 Humble'is, mis ühildub šassiiga.
SampKoodi Z1 Pro robotkäe integreerimiseks šassiiga leiate allolevast GitHubi hoidlast:
https://github.com/roboworksdev/pickerbotproarm
www.roboworks.net
Autoriõigus © 2024 Roboworks. Kõik õigused kaitstud.
Dokumendid / Ressursid
 |
ROBOWORKS Pickerbot Pro Vali ja kukuta mobiilne robot [pdfKasutusjuhend Pickerbot Pro, Pickerbot Pro Vali ja kukuta mobiilne robot, vali ja kukuta mobiilne robot, kukuta mobiilne robot, mobiilne robot, robot |