ROBOWORKS N10 Robot Haridusprogrammeeritav mobiilne robot

Tehnilised andmed
| Toote nimi | Mootori vähendamise suhe | Maksimaalne kiirus | Kaal | Maksimaalne kandevõime | Suurus | Minimaalne pöörderaadius |
|---|---|---|---|---|---|---|
| Robot 2 | 1:27 | 1.3m/s | 5.92 kg | 16 kg | 445 * 360 * 206 mm | 0.77 m |
| Rosbot Pro | 1:18 | 1.65m/s | 19.54 kg | 35 kg | 774 * 570 * 227 mm | 1.02 m |
| Rosbot Plus | 1:18 | 2.33m/s | 35.16 kg | 22 kg | 766 * 671 * 319 mm | 1.29 m |
Aku eluiga ja toiteallikas:
- Robot 2: umbes 9.5 tundi (ilma koormuseta), umbes 8.5 tundi (täislaadimisel)
- Robot Pro: umbes 4.5 tundi (ilma koormuseta), umbes 3 tundi (täislaadimisel)
- Toide: 24v 6000 mAh aku + 3A vooluga nutikas laadija
Rooli- ja sõidusüsteem:
Põhikomponendid hõlmavad järgmist:
- Rooliajam: S20F 20kg pöördemomendiga digitaalne servo
- Rattad: WH060 60 kg pöördemomendiga digitaalne servo, 125 mm läbimõõduga täiskummist rattad Rosbot 2 jaoks, 150 mm läbimõõduga täiskummist rattad Robot Pro jaoks ja
- Kodeerija: 500 rea AB-faasi ülitäpne kodeerija
- Vedrustussüsteem: koaksiaalne pendelvedrustussüsteem Robot 2 jaoks, 4 W sõltumatu vedrustussüsteem Robot Pro ja
- Juhtliides: iOS ja Android rakendus Bluetoothi või Wifi kaudu, PS2, CAN, jadaport, USB
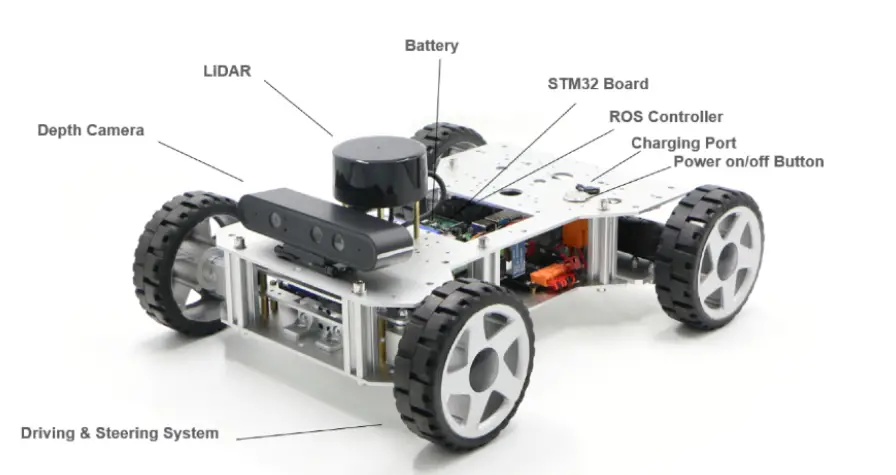
ROS-kontrollerite tutvustus:
Kõik RRobotsarid on varustatud Orbbec Astra sügavuskaameraga erinevateks kasutusteks, sealhulgas žestide juhtimiseks, luustiku jälgimiseks ja 3D-skaneerimiseks.
STM32 tahvel:
Plaadil on STM32F103RC tuum, millel on erinevad funktsioonid, sealhulgas mälud, kell, lähtestamine ja toitehaldus, toite-DMA, silumisrežiim, I/O-pordid, taimerid ja sideliides.
Korduma kippuvad küsimused
K: Kuidas akut laadida?
V: Kasutage RRoboti laadimiseks kaasasolevat 3A vooluga nutikat laadijat koos 24v 6000mAh akuga
K: Mis on Rosbot Pro aku tööiga?
V: Robot Pro aku tööiga on umbes 4.5 tundi ilma koormuseta ja umbes 3 tundi täiskoormusega.
K: Kas ma saan Rosbotit nutitelefoniga juhtida?
V: Jah, saate Rosbotit juhtida iOS-i ja Androidi rakendusega Bluetoothi või Wifi kaudu.
Võtmekomponent
| Varia%on | Pilt |
| Robot 2 | 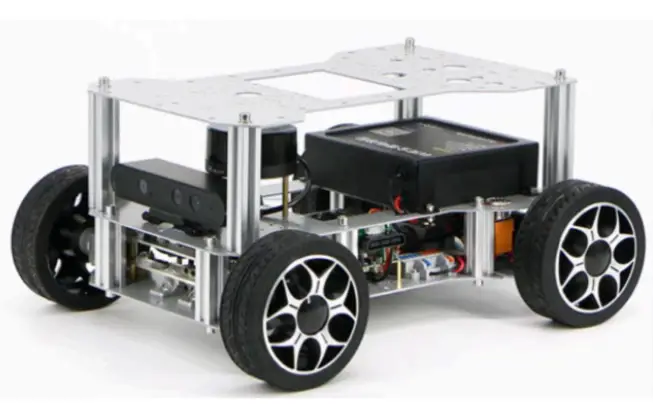 |
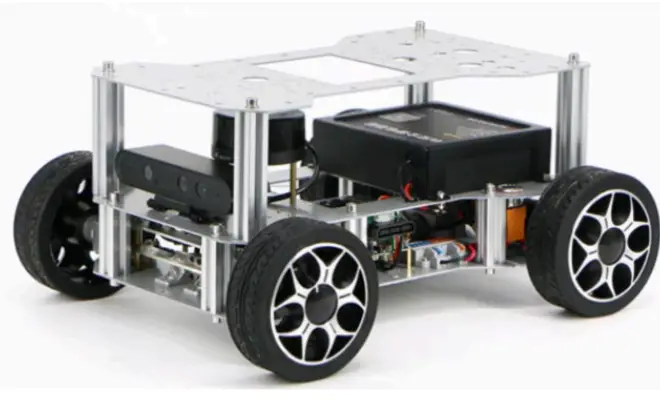
| Robot Pro |  |
| Robot Plus |  |
Toote spetsifikatsioonid
|
Toote maatriks |
 |
 |
 |
| Toote nimi | Robot 2 | Robot Pro | Robot Plus |
| Mootori vähendamise suhe | 1:27 | 1:18 | 1:18 |
| Maksimaalne kiirus | 1.3m/s | 1.65m/s | 2.33m/s |
| Kaal | 5.92 kg | 19.54 kg | 35.16 kg |
| Maksimaalne kandevõime | 16 kg | 35 kg | 22 kg |
| Suurus | 445 * 360 * 206 mm | 774 * 570 * 227 mm | 766 * 671 * 319 mm |
| Minimaalne pöörderaadius | 0.77 m | 1.02 m | 1.29 m |
| Aku tööiga | Umbes 9.5 tundi (ilma koormuseta), umbes 8.5 tundi (täislaadimisel) | Umbes 4.5 tundi (ilma koormuseta), umbes 3 tundi (täislaadimisel) | |
| Toiteallikas | 24v 6000 mAh aku + 3A vooluga nutikas laadija | ||
| Rooliseade | S20F 20kg pöördemomendiga digitaalne servo | WH060 60kg pöördemomendiga digitaalne servo | |
| Rattad | 125 mm läbimõõduga täiskummist rattad | 150 mm läbimõõduga täiskummist rattad | 254 mm täispuhutavad kummirattad |
| Kodeerija | 500 rea AB-faasi ülitäpne kodeerija | ||
| Vedrustussüsteem | Koaksiaalpendli vedrustussüsteem | 4W sõltumatu vedrustussüsteem | |
| Juhtliides | iOS ja Android rakendus Bluetoothi või Wifi kaudu, PS2, CAN, jadaport, USB | ||
ROS-kontrollerite tutvustus
Vidia Jetsoni platvormil põhineva RRobotiga kasutamiseks on saadaval kahte tüüpi ROS-kontrollereid. Jetson Orin Nano sobib rohkem teaduse ja hariduse jaoks. Jetson Orin NX sobib ideaalselt toodete prototüüpimiseks ja kommertsrakendusteks. Järgmine tabel illustreerib peamisi tehnilisi erinevusi erinevate Roboworksi kontrollerite vahel. Mõlemad plaadid võimaldavad kõrgetasemelist arvutamist ja sobivad täiustatud robotrakendustega, nagu arvutinägemine, sügavõpe ja liikumise planeerimine.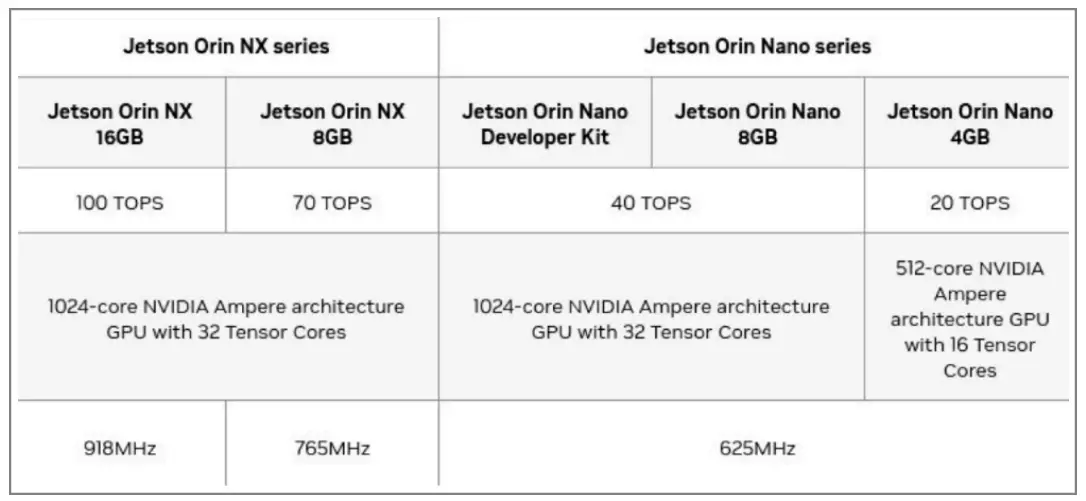
Andursüsteem: LiDAR ja sügavuskaamera
Leishen LSLiDAR on installitud kõikidele Rosboti variatsioonidele, kus kasutatakse kas N10 või M10 mudelit. Need LLiDAR-id pakuvad 3360–3360-kraadist skaneerimist ja ümbruse tajumist ning neil on kompaktne ja kerge ESI. Neil on kõrge signaalimüra suhe ja suurepärane tuvastamise jõudlus hästi/madalalt peegelduvate objektide puhul ning need toimivad hästi tugevates valgustingimustes. Nende tuvastusulatus on 30 meetrit ja skaneerimissagedus 12 Hz. See LiDAR integreerub sujuvalt robotitesse, tagades, et kõik kaardistamise ja navigeerimise kasutusvõimalused on teie projektis hõlpsasti saavutatavad. Allolev tabel võtab kokku liugurite tehnilised andmed: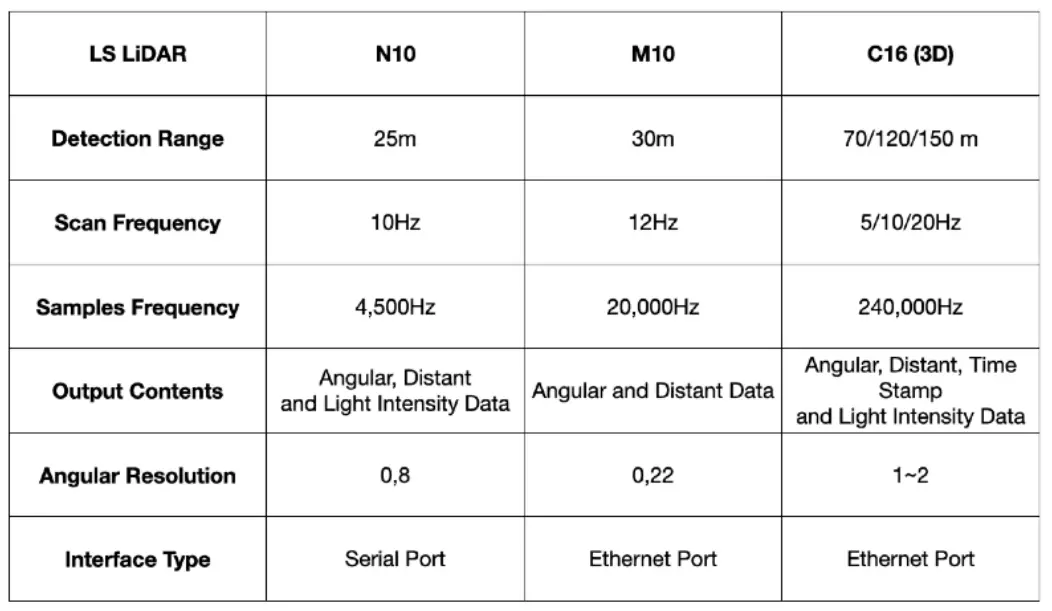
Lisaks on kõik robotid varustatud Orbbec Astra sügavuskaameraga, mis on RGBD kaamera. See kaamera on optimeeritud paljudeks kasutusteks, sealhulgas žestide juhtimiseks, luustiku jälgimiseks, 3D-skaneerimiseks ja punktipilve arendamiseks. Järgnev tabel võtab kokku sügavuskaamera tehnilised omadused.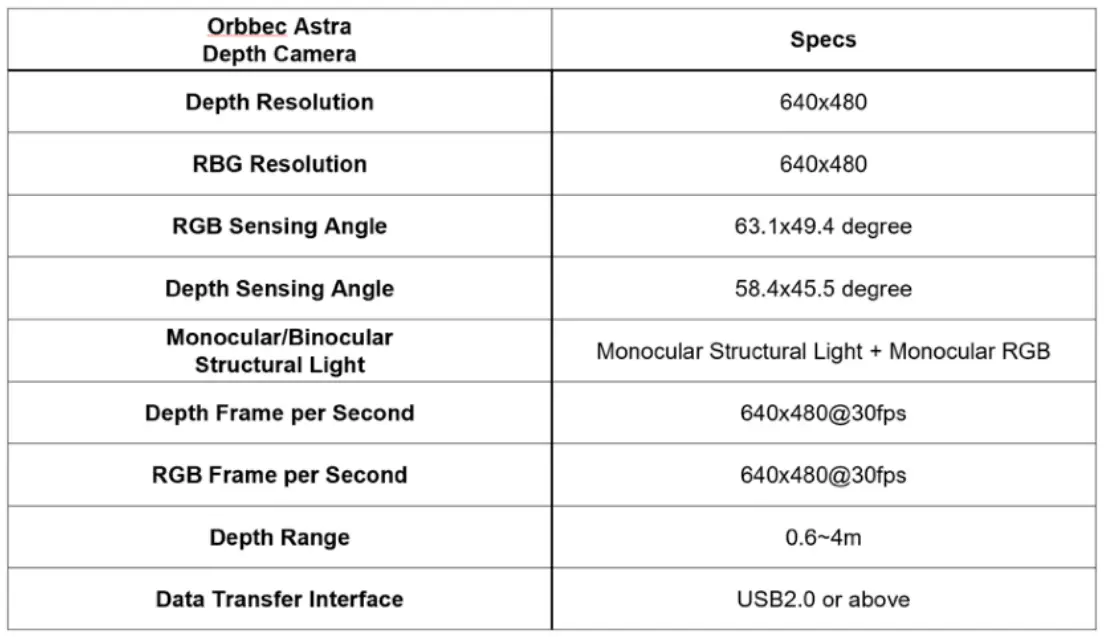
STM32 plaat (mootori juhtimine, toitehaldus ja IMU)
STM32F103RC plaat on mikrokontroller, mida kasutatakse kõigis Rosbotides. Sellel on suure jõudlusega ARM Cortex-M3 32-bitine RISC-tuum, mis töötab sagedusel 72 MHz, koos kiirete manustatud mäludega. See töötab temperatuurivahemikus -40°C kuni +105°C, sobides kõikidele robotrakendustele ülemaailmses kliimas. On energiasäästurežiime, mis võimaldavad kujundada vähese energiatarbega rakendusi. Mõned selle mikrokontrolleri rakendused hõlmavad mootoriajami, rakenduste juhtimist, robotrakenduste meditsiini- ja pihuseadmeid, personaalarvutite ja mängude välisseadmeid, GPS-platvorme, tööstuslikke rakendusi, häiresüsteemide video sisetelefone ja skannereid.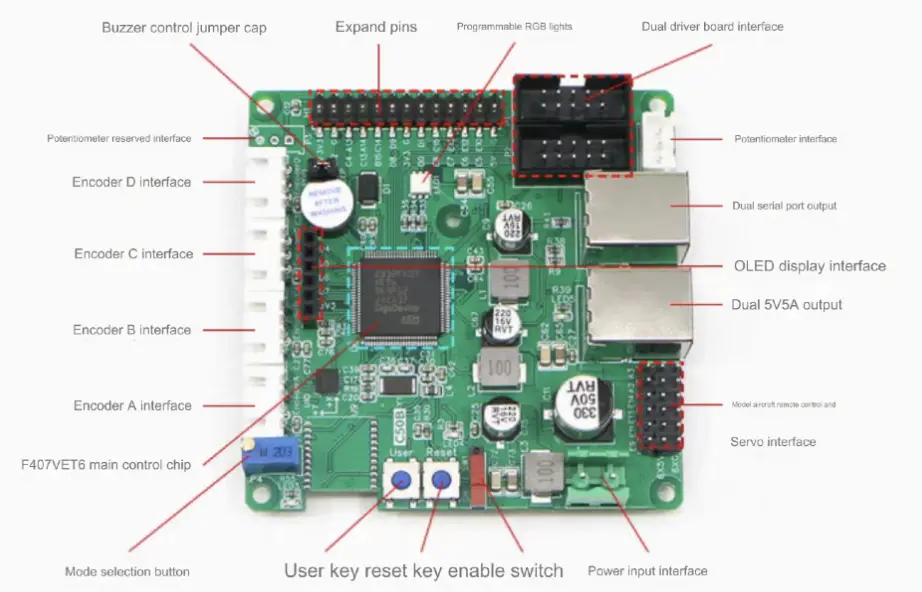
| STM32F103RC | Omadused |
| Tuum | ARM32-bitine Cortex –M3 CPU Max kiirus 72 MHz |
| Mälestused | 512 KB välkmälu 64 kB SRAM |
| Kell, lähtestamine ja tarnehaldus | 2.0 kuni 3.6 V rakenduste toide ja sisendid |
|
Võimsus |
Puhke-, seiska- ja ooterežiimid
V-toide RTC ja varuregistrite jaoks BAT |
| DMA | 12-kanaliline DMA kontroller |
| Silumisrežiim | SWD ja JTAG liidesed Cortex-M3 Embedded Trace Macrocell |
| I/O pordid | 51 I/O porti (kaardistatav 16 välise katkestusvektoriga ja 5 V tolerantsed) |
|
Taimerid |
4 × 16-bitised taimerid
2 x 16-bitise mootori juhtimise PWM taimerit (hädaseiskamisega) 2 x valvekoera taimerit (sõltumatu ja aken) SysTicki taimer (24-bitine loendur) 2 x 16-bitist põhitaimerit DAC-i juhtimiseks |
|
Sideliides |
USB 2.0 täiskiirusega liides SDIO liides
CAN-liides (2.0B aktiivne) |
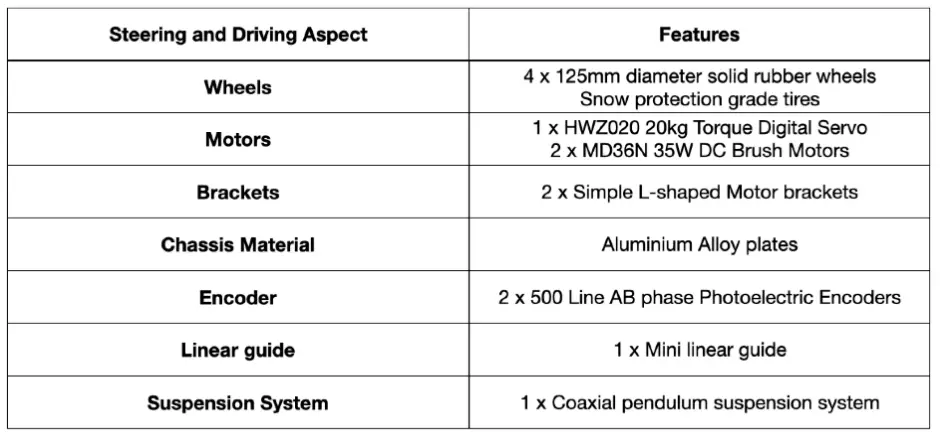
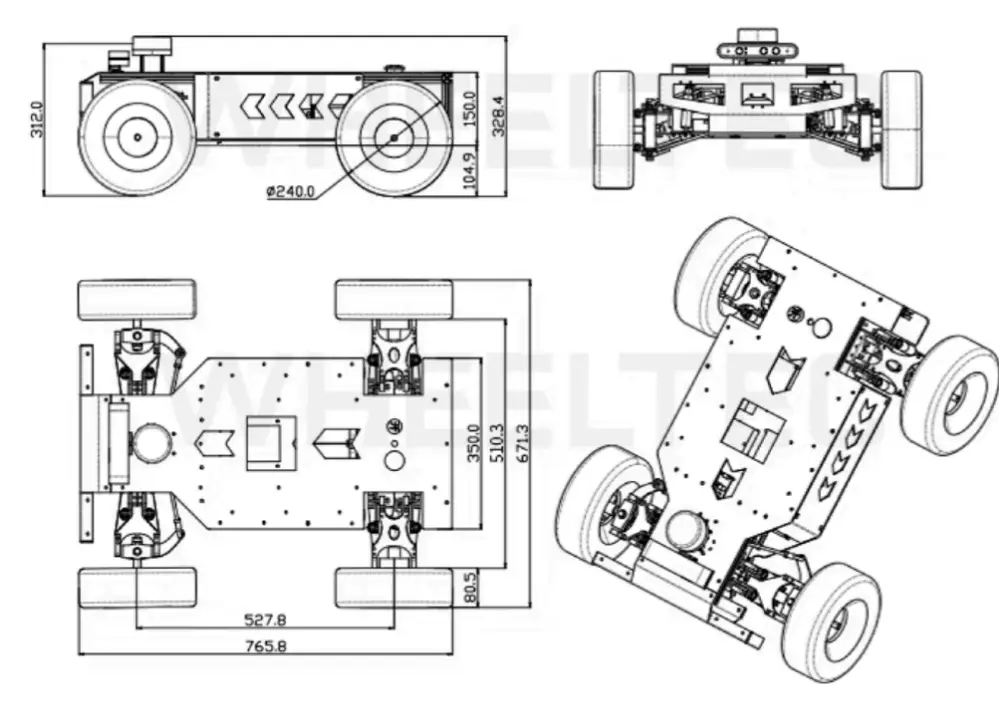
Rooli- ja sõidusüsteem
Rooli- ja juhtimissüsteem on integreeritud roboti disaini ja ehitusega. Olenevalt ostetud mudelist on see kas kahe- või neljarattaveoline, kusjuures mõlemad variandid sobivad erinevateks uurimis- ja arendustegevuseks. Kõigi robotite rattad on täiskummist ja lumekaitseklassi rehvidega. Seal on koaksiaalne pendelvedrustussüsteem ja seeria Robotid on varustatud sõltumatute vedrustussüsteemidega amortisaatoritega, mis tagavad nende eduka navigeerimise keerulisel maastikul.
Roolimise ja sõidu tehnilised andmed:
Roboti šassii disainiskeem:
Robot 2

Robot Pro
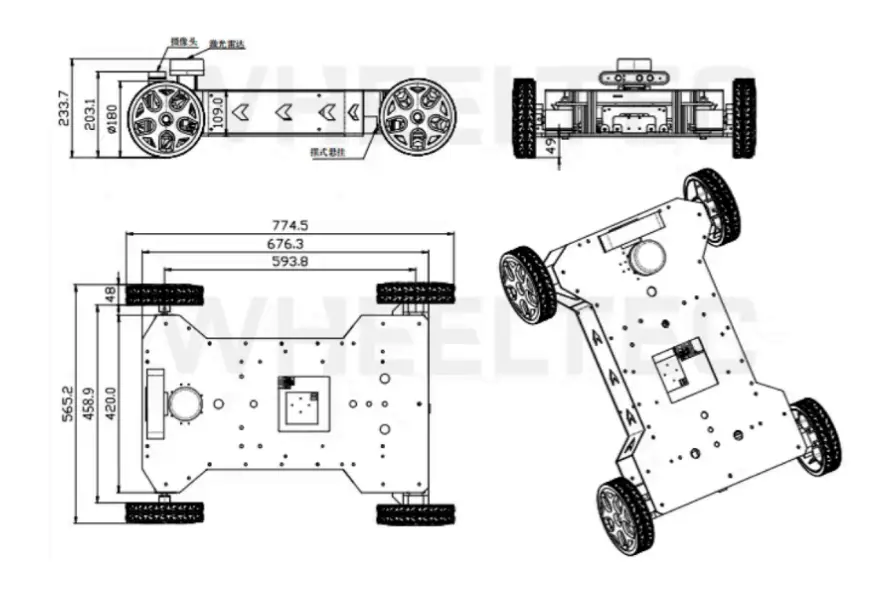
Robot Plus
Toitehaldus
Power Mag – magnetiline LFP aku:
Kõigil Rosbotidel on 6000 mAh Power Mag, magnetiline LFP (liitiumraudfosfaat) aku ja toitelaadija. Kliendid saavad lisatasu eest uuendada akut 20000 mAh-ni. LFP akud on teatud tüüpi liitiumioonakud, mis on tuntud oma stabiilsuse, ohutuse ja pika tööea poolest. Erinevalt traditsioonilistest liitiumioonakudest, mis kasutavad koobaltit või niklit, põhinevad LFP akud raudfosfaadil, pakkudes säästvamat ja vähem mürgist alternatiivi. Need on väga vastupidavad termilisele äravoolule, vähendades ülekuumenemise ja tulekahju ohtu. Kuigi nende energiatihedus on teiste liitiumioonakudega võrreldes madalam, on LFP akud silmapaistvad vastupidavuse, pikema eluea, kiirema laadimise ja parema jõudlusega äärmuslikel temperatuuridel, mistõttu on need ideaalsed elektrisõidukite (EV) ja energiasalvestussüsteemide jaoks. Power Magi saab selle magnetilise aluskonstruktsiooni tõttu kinnitada roboti mis tahes metallpinnale. See muudab patareide vahetamise kiireks ja lihtsaks.
Tehnilised andmed:
| Mudel | 6000 mAh | 20000 mAh |
| Akupakett |
22.4 V 6000 mAh |
22.4 V 20000 mAh |
|
Põhimaterjal |
Liitiumraudfosfaat |
Liitiumraudfosfaat |
| Cutoff Voltage | 16.5 V | 16.5 V |
|
Full Voltage |
25.55 V |
25.55 V |
| Laadimisvool | 3A | 3A |
| Kesta materjal |
Metallist |
Metallist |
| Tühjenemise jõudlus | 15A pidev tühjenemine | 20A pidev tühjenemine |
|
Pistik |
DC4017MM emane pistik (laadimine) XT60U-F emane pistik (tühjenemine) |
DC4017MM emane pistik (laadimine) XT60U-F emane pistik (tühjenemine) |
|
Suurus |
177 * 146 * 42 mm |
208 * 154 * 97 mm |
|
Kaal |
1.72 kg |
4.1 kg |
Aku kaitse
Lühis, liigvool, ülelaadimine, ülelaadimise kaitse, laadimise toetamine kasutamise ajal, sisseehitatud kaitseklapp, leegiaeglustav plaat.
Automaatne laadimisjaam (Power+):
Automaatlaadimisjaam on komplektis mudeliga Rosbot 2+ ja selle saab eraldi osta, et töötada koos Rosbot 2, Rosbot Pro ja Rosbot Plusiga.
ROS 2 kiirkäivitus
Kui robot esimest korda sisse lülitatakse, juhib seda vaikimisi ROS. See tähendab, et STM32 šassii kontrolleri plaat aktsepteerib ROS 2 kontrolleri – Jetson Orini käske. Esialgne seadistamine on kiire ja lihtne, looge hostarvutist (soovitatav Ubuntu Linux) ühendus roboti Wi-Fi levialaga. Vaikimisi on parool "Dongguan". Järgmisena looge SSH-ga ühendus robotiga Linuxterminatee l kaudu. P-aadress on 192.168.0.10 ja 0 ning vaikeparool on Dongguan.
Terminalijuurdepääsuga robotile saate navigeerida ROS 2 tööruumi kausta jaotises "wheeltec_ROS 2". Enne testprogrammide käivitamist navigeerige saidile wheeltec_ROS 2/turn_on_wheeltec_robot/ ja leidke asukoht wheeltec_udev.sh – seda skripti tuleb käivitada, tavaliselt ainult üks kord, et tagama välisseadmete õige konfiguratsiooni. Nüüd saate testida roboti funktsionaalsust, ROS 2 kontrolleri funktsionaalsuse käivitamiseks käivitage: "relaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch"
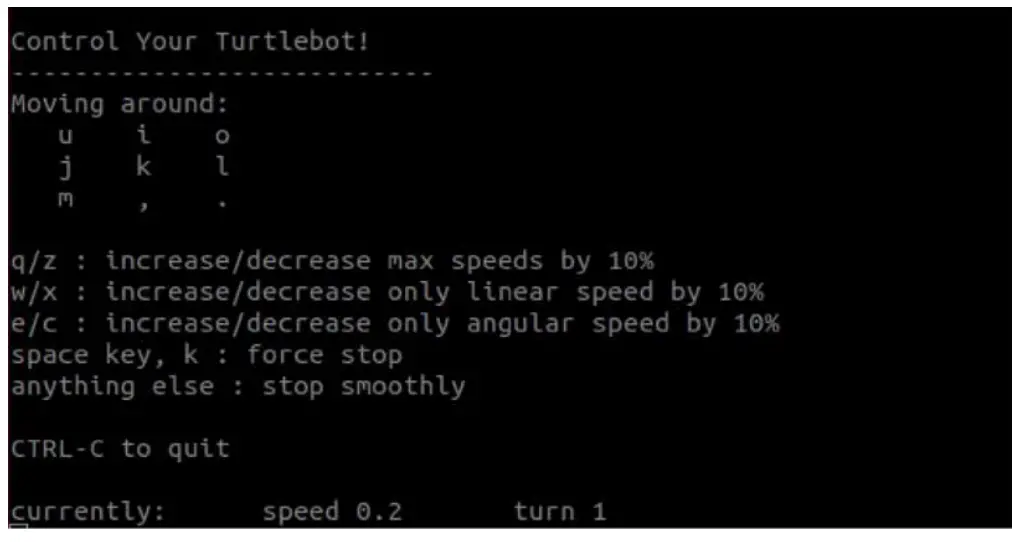
Teises terminalis saate šassii juhtimise kinnitamiseks kasutada sõlme keyboard_teleop, see on populaarse ROS 2 Turtlebot ex modifitseeritud versioon.ample. Sisestage: "relaunch wheeltec_robot_rc keyboard_teleop.launch"
Eelinstallitud ROS 2 Humble paketid
Allpool on toodud järgmised kasutajale orienteeritud paketid, kuigi teised paketid võivad olla olemas, on need ainult sõltuvused.
- turn_on_wheeltec_robot
See pakett on ülioluline roboti funktsionaalsuse ja šassiikontrolleriga suhtlemise võimaldamiseks. ROS 2 ja kontrolleri konfigureerimiseks tuleb igal alglaadimisel kasutada esmast skripti "turn_on_wheeltec_robot.launch". - wheeltec_rviz2
Sisaldab käivitamist files käivitada viz Pickerbot Pro jaoks kohandatud konfiguratsiooniga. - wheeltec_robot_slam
SLAM-i kaardistamise ja lokaliseerimise pakett koos kohandatud konfiguratsiooniga Pickerbot Pro jaoks. - wheeltec_robot_rrt2
Kiiresti uuriv juhuslik puualgoritm – see pakett võimaldab Pickerbot Pro-l planeerida tee soovitud asukohta, käivitades uurimissõlmed. - wheeltec_robot_klaviatuur
Mugav pakett roboti funktsionaalsuse valideerimiseks ja juhtimiseks klaviatuuri abil, sealhulgas kaugarvutist. - wheeltec_robot_nav2
ROS 2 Navigation 2 sõlmepakett. - wheeltec_lidar_ros2
ROS 2 Lidar pakett Leishen M10/N10 seadistamiseks. - wheeltec_joy
Juhtkangi juhtimispakett sisaldab käivitamist files juhtkangi sõlmede jaoks. - lihtne_järgija_ros2
Põhilised objektide ja joonte järgimise algoritmid, kasutades kas laserskaneerimist või sügavuskaamerat. - ros2_astra_camera
Astra sügavuskaamera pakett koos draiverite ja käivitamisega files.
Kokkuvõte
Robot on mõeldud ROS-i (Robot Operating System) arendajatele, õpetajatele ja õpilastele. Rosboti südameks on täielikult programmeeritav tarkvararaamistik ja konfigureeritav riistvaraarhitektuur, mis põhineb populaarseimal robotplatvormil – ROS.
Robot on saadaval kolmes kategoorias:
- Robot 2 - Sobib ROS-i algajatele ja väikese eelarvega projektidele.
- Robot Pro – Sobib ROS-i arendajatele ja koolitajatele, kes vajavad kiireks prototüüpimiseks või õpetamiseks mitmekülgset süsteemi.
- Rosbot Plus - See on sõltumatute vedrustussüsteemidega Rosboti nelikveoline versioon. See kategooria on piisavalt tõsine, et seda tööstuse ja kaubanduse arendamiseks kaaluda. Robot on varustatud populaarsete ROS-kontrolleritega, näiteks:
- Jetson Orin Nano
- Jetson Orin NX
Koostas: Wayne Liu, Reilly Smithers ja Tara Hercz 30. september 2024
Versiooni nr: 20240930
Dokumendid / Ressursid
 |
ROBOWORKS N10 Robot Haridusprogrammeeritav mobiilne robot [pdfKasutusjuhend N10 robotite õppeprogramm, programmeeritav mobiilne robot, N10, programmeeritav mobiilne robot, programmeeritav mobiilne robot, programmeeritav mobiilne robot, mobiilne robot, robot |