STMicroelectronics VL53L5CX mitmetsooniline lennuaja kaugusandur

Sissejuhatus
Selle kasutusjuhendi eesmärk on selgitada, kuidas käsitseda VL53L5CX lennuajaandurit (ToF), kasutades ultra lite draiveri (ULD) API-t. See kirjeldab seadme programmeerimise põhifunktsioone, kalibreerimisi ja väljundtulemusi.
VL53L5CX on tipptasemel, ToF, mitmetsooniline andur, mis täiustab STMicroelectronics Flight Sense'i tooteperekonda. Miniatuurses tagasivalgustavas pakendis on see integreeritud SPAD-massiivi, füüsilised infrapunafiltrid ja difraktsioonilised optilised elemendid (DOE), et saavutada erinevate katteklaasi materjalidega parimat jõudlust erinevates ümbritseva valgustuse tingimustes.
Mitmetsoonilise kauguse mõõtmine on võimalik kuni 8 × 8 tsooni laia 63° diagonaalväljaga. view (FoV), mis võib olla
tarkvaraga vähendatud. VL53L5CX iga tsoon mõõdab sihtmärgi kaugust kuni 4 meetrit, maksimaalse sagedusega 60 Hz.
Tänu STMicroelectronics patenteeritud histogrammi algoritmidele on VL53L5CX võimeline tuvastama FoV-s erinevaid objekte.
Histogramm tagab ka immuunsuse katta üle 60 cm ulatuva klaasi läbirääkimise.

Viited
VL53L5CX andmeleht (DS13754).
Akronüümid ja lühendid
| Akronüüm/lühend | Definitsioon |
| DOE | difraktiivne optiline element |
| FoV | valdkonnas view |
| I²C | integraallülitus (jadasiin) |
| Kcps/SPAD | Kiloarv sekundis spadi kohta (ühik, mida kasutatakse footonite arvu kvantifitseerimiseks SPAD-massiivis) |
| RAM | juhusliku juurdepääsuga mälu |
| SCL | jadakella rida |
| SDA | jadaandmed |
| SPAD | ühe footoni laviini diood |
| ToF | Lennuaeg |
| ULD | ultra lite draiver |
| VCSEL | vertikaalse õõnsuse pinna kiirgav diood |
| VHV | väga kõrge voltage |
| Xtalk | läbirääkimine |
Funktsionaalne kirjeldus
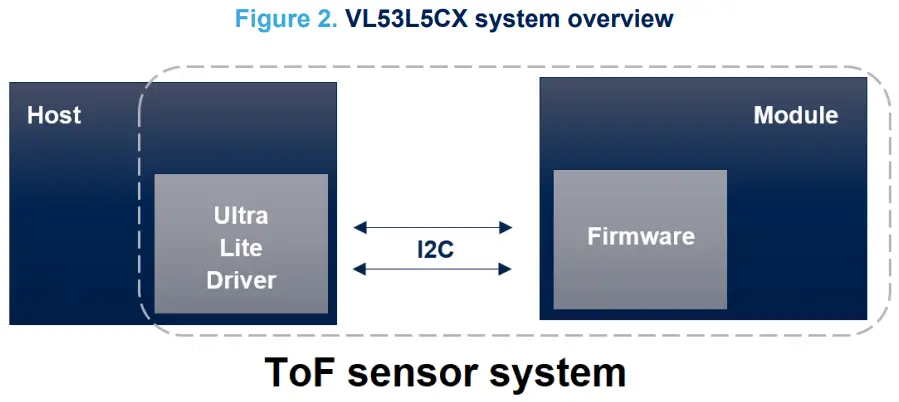
Süsteem läbiview
Süsteem VL53L5CX koosneb riistvaramoodulist ja ülilihtsast draiveritarkvarast (VL53L5CX ULD), mis töötab hostis (vt joonist allpool). Riistvaramoodul sisaldab ToF-andurit. STMicroelectronics tarnib tarkvaradraiverit, mida selles dokumendis nimetatakse draiveriks. See dokument kirjeldab draiveri funktsioone, mis on hostile juurdepääsetavad. Need funktsioonid juhivad andurit ja hangivad kaugusandmeid.
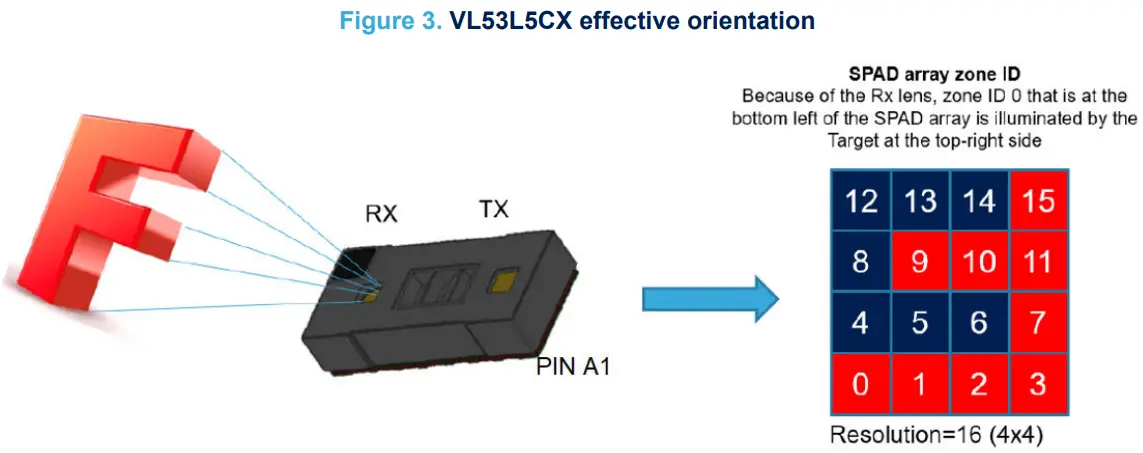
Tõhus orientatsioon
Moodul sisaldab objektiivi üle Rx ava, mis pöörab (horisontaalselt ja vertikaalselt) sihtmärgi jäädvustatud kujutist. Järelikult valgustatakse tsoonina 0 määratletud tsooni SPAD-massiivi alumises vasakus nurgas stseeni paremas ülanurgas asuv sihtmärk.
Skeemid ja I²C konfiguratsioon
Draiveri ja püsivara vahelist sidet haldab I²C, mis on võimeline töötama kuni 1 MHz. Rakendamine nõuab SCL- ja SDA-liinide tõmbamist. Lisateabe saamiseks vaadake VL53L5CX andmelehte.
Seadmel VL53L5CX on I²C vaikeaadress 0x52. Siiski on võimalik muuta vaikeaadressi, et vältida konflikte teiste seadmetega või hõlbustada mitme VL53L5CX mooduli lisamist süsteemi suurema süsteemi FoV jaoks. I²C-aadressi saab muuta funktsiooni vl53l5cx_set_i2c_address() abil.
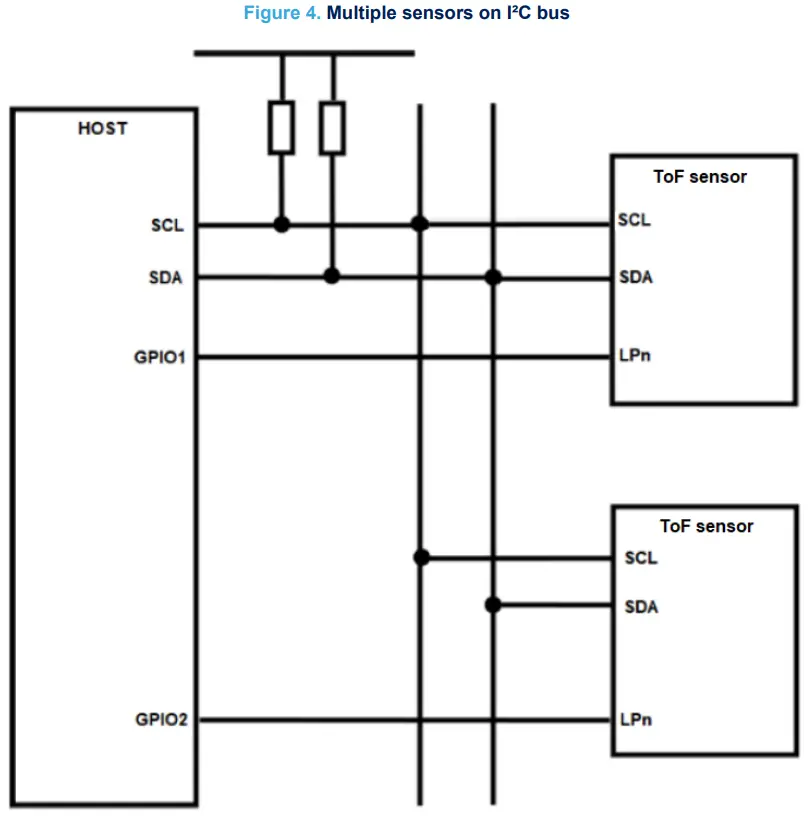
Seadme I²C-aadressi muutmise võimaldamiseks, ilma et see mõjutaks teisi I²C-siinil, on oluline keelata muudetamata seadmete I²C-side. Menetlus on järgmine:
- Lülitage süsteem sisse nagu tavaliselt.
- Tõmmake alla seadme LPn-tihvt, mille aadressi ei muudeta.
- Tõmmake üles seadme LPn-viik, mille I²C-aadress on muudetud.
- Programmeerige seadmesse I²C-aadress funktsiooni set_i2c_address() abil.
- Tõmmake üles ümberprogrammeerimata seadme LPn-tihvt.
Kõik seadmed peaksid nüüd olema I²C siinis saadaval. Korrake ülaltoodud samme kõigi süsteemis olevate VL53L5CX seadmete puhul, mis vajavad uut I²C-aadressi.
Paketi sisu ja andmevoog
Draiveri arhitektuur ja sisu
Pakett VL53L5CX ULD koosneb neljast kaustast. Draiver asub kaustas / VL53L5CX_ULD_API.
Juht koosneb kohustuslikest ja valikulistest files. Valikuline files on plugins kasutatakse ULD funktsioonide laiendamiseks.
Iga pistikprogramm algab sõnaga "vl53l5cx_plugin" (nt vl53l5cx_plugin_xtalk.h). Kui kasutaja pakutavat ei soovi plugins, saab neid eemaldada ilma draiveri muid funktsioone mõjutamata. Järgmine joonis näitab kohustuslikku files ja valikuline plugins.
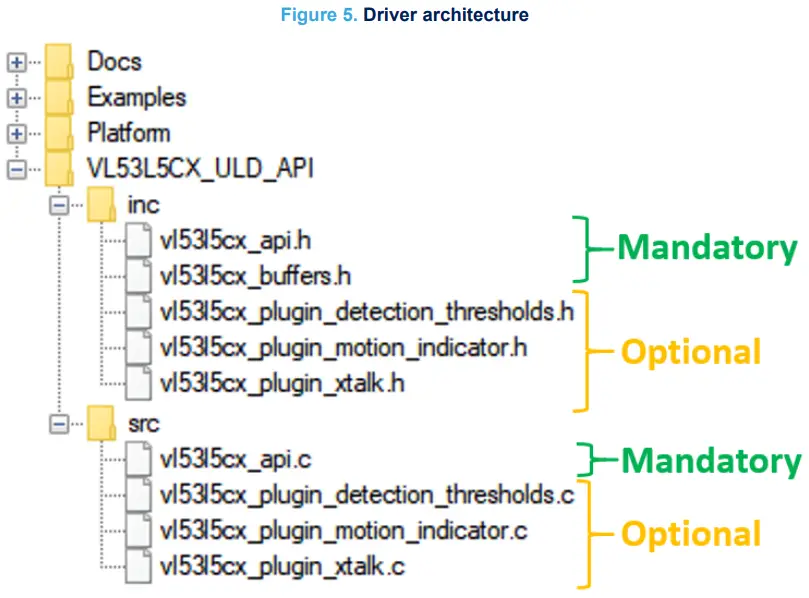
Samuti peab kasutaja rakendama kahte files asub kaustas /Platform. Kavandatud platvorm on tühi kest ja see peab olema täidetud spetsiaalsete funktsioonidega.
Märkus. Platvorm.h file sisaldab ULD kasutamiseks kohustuslikke makrosid. Kõik file sisu on ULD korrektseks kasutamiseks kohustuslik.
Kalibreerimisvoog
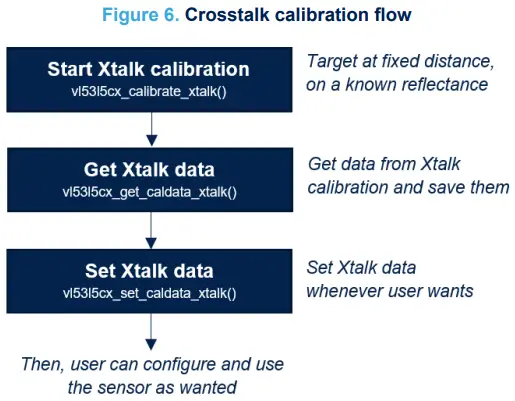
Crosstalk (Xtalk) on määratletud kui SPAD-massiivile vastuvõetud signaali hulk, mis on tingitud VCSEL-i valguse peegeldusest mooduli peale lisatud kaitseakna sees (katteklaas). Moodul VL53L5CX on isekalibreeritud ja seda saab kasutada ilma täiendava kalibreerimiseta.
Kui moodul on katteklaasiga kaitstud, võib osutuda vajalikuks läbilöögi kalibreerimine. Tänu histogrammi algoritmile on VL53L5CX immuunne üle 60 cm läbirääkimiste suhtes. Kuid lühikestel vahemaadel alla 60 cm võib Xtalk olla tegelikust tagastatavast signaalist suurem. See annab vale sihtmärgi näidu või paneb sihtmärgid tunduma lähemal, kui nad tegelikult on. Kõik ülekõnede kalibreerimise funktsioonid sisalduvad Xtalki pistikprogrammis (valikuline). Kasutaja peab kasutama file 'vl53l5cx_plugin_xtalk'.
Ristkõnet saab kalibreerida üks kord ja andmeid saab salvestada, et neid hiljem uuesti kasutada. Vajalik on sihtmärk kindlal kaugusel ja teadaoleva peegeldusvõimega. Minimaalne nõutav kaugus on 600 mm ja sihtmärk peab katma kogu FoV. Olenevalt seadistusest saab kasutaja sätteid muuta, et kohandada ülekõnede kalibreerimist, nagu on soovitatud järgmises tabelis.
Tabel 1. Kalibreerimiseks saadaolevad sätted
| Seadistamine | Min | Pakkunud STMicroelectronics | Max |
| Kaugus [mm] | 600 | 600 | 3000 |
| Side arvamples | 1 | 4 | 16 |
| Peegeldus [%] | 1 | 3 | 99 |
Märkus. Side arvu suurendamineamples suurendab täpsust, kuid pikendab ka kalibreerimiseks kuluvat aega. Aeg s-de arvu suhtesamples on lineaarne ja väärtused järgivad ligikaudset ajalõpu:
- 1 sample ≈ 1 sekund
- 4 sampvähem ≈ 2.5 sekundit
- 16 sampvähem ≈ 8.5 sekundit
Kalibreerimine toimub funktsiooni vl53l5cx_calibrate_xtalk() abil. Seda funktsiooni saab kasutada igal ajal. Andur tuleb siiski esmalt lähtestada. Järgmine joonis kujutab ülekõnede kalibreerimise voogu.
Ulatuslik vool
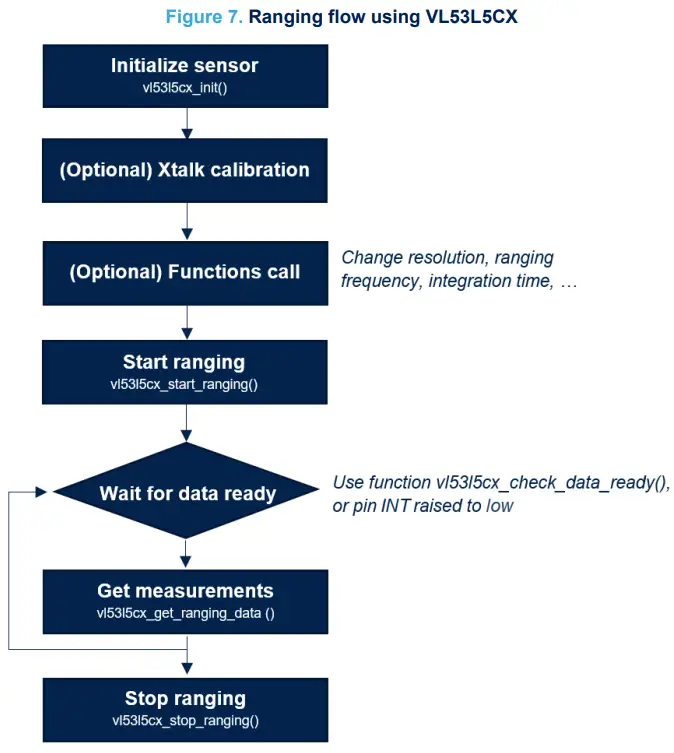
Järgmine joonis kujutab mõõtmiste saamiseks kasutatud vahemiku voolu. Enne kaugusmõõtmise seansi alustamist tuleb kasutada Xtalki kalibreerimist ja valikulisi funktsioonikutseid. Funktsioone get/set ei saa kauguse määramise seansi ajal kasutada ja lennu ajal programmeerimist ei toetata.
Saadaolevad funktsioonid
VL53L5CX ULD API sisaldab mitmeid funktsioone, mis võimaldavad kasutajal vastavalt kasutusjuhule andurit häälestada. Kõiki juhi jaoks saadaolevaid funktsioone kirjeldatakse järgmistes osades.
Initsialiseerimine
Enne anduri VL53L5CX kasutamist tuleb lähtestada. See toiming nõuab, et kasutaja:
- Lülitage andur sisse (VDDIO, AVDD, LPn-viigud on seatud kõrgele ja viik I2C_RST väärtusele 0)
- Kutsuge funktsioon vl53l5cx_init(). Funktsioon kopeerib püsivara (~84 Kbytes) moodulisse. Selleks laaditakse kood üle I²C-liidese ja sooritatakse alglaadimise lõpuleviimiseks alglaadimisrutiin.
Anduri lähtestamise haldus
Seadme lähtestamiseks tuleb järgmised tihvtid ümber lülitada:
- Seadke tihvtide VDDIO, AVDD ja LPn viigud madalale tasemele.
- Oodake 10 ms.
- Seadke VDDIO, AVDD ja LPn viigud kõrgele.
Märkus. Ainult I2C_RST viigu ümberlülitamine lähtestab I²C side.
Resolutsioon
Eraldusvõime vastab saadaolevate tsoonide arvule. Anduril VL53L5CX on kaks võimalikku eraldusvõimet: 4×4 (16 tsooni) ja 8×8 (64 tsooni). Vaikimisi on andur programmeeritud 4×4.
Funktsioon vl53l5cx_set_resolution() võimaldab kasutajal eraldusvõimet muuta. Kuna vahemiku sagedus sõltub eraldusvõimest, tuleb seda funktsiooni kasutada enne vahemiku sageduse värskendamist. Lisaks suurendab eraldusvõime muutmine tulemuste lugemisel ka I²C siini liiklust.
Vahemiku sagedus
Vahemiku sagedust saab kasutada mõõtmissageduse muutmiseks. Kuna maksimaalne sagedus on 4×4 ja 8×8 eraldusvõime vahel erinev, tuleb seda funktsiooni kasutada pärast eraldusvõime valimist. Lubatud minimaalsed ja maksimaalsed väärtused on loetletud järgmises tabelis.
Tabel 2. Minimaalsed ja maksimaalsed ulatuse sagedused
| Resolutsioon | Minimaalne ulatussagedus [Hz] | Maksimaalne ulatussagedus [Hz] |
| 4 × 4 | 1 | 60 |
| 8 × 8 | 1 | 15 |
Vahemiku sagedust saab värskendada funktsiooni vl53l5cx_set_ranging_frequency_hz() abil. Vaikimisi on vahemiku sageduseks seatud 1 Hz.
Vahemaa režiim
Vahemiku režiim võimaldab kasutajal valida suure jõudluse või väikese energiatarbimise vahel. Pakutud on kaks režiimi:
- Pidev: seade haarab pidevalt kasutaja määratud sagedusega kaadreid. VCSEL on lubatud kogu ulatuse ajal, seega on maksimaalne kaugus ja ümbritseva keskkonna häirekindlus paremad. Seda režiimi soovitatakse kiirete mõõtmiste või suure jõudluse jaoks.
- Autonoomne: see on vaikerežiim. Seade haarab pidevalt kasutaja määratud sagedusega kaadreid. VCSEL on lubatud kasutaja määratud perioodi jooksul, kasutades funktsiooni vl53l5cx_set_integration_time_ms(). Kuna VCSEL ei ole alati lubatud, väheneb energiatarve. Eelised on ilmsemad vähendatud levisageduse korral. See režiim on soovitatav väikese energiatarbega rakenduste jaoks.
Vahemiku režiimi saab muuta funktsiooni vl53l5cx_set_ranging_mode() abil.
Integratsiooni aeg
Integreerimisaeg on funktsioon, mis on saadaval ainult autonoomses kauguse määramise režiimis (vt jaotist 4.5: Vahemaa määramise režiim). See võimaldab kasutajal muuta kellaaega, kui VCSEL on lubatud. Integreerimisaja muutmine, kui vahemiku määramise režiim on seatud pidevaks, ei mõjuta. Integratsiooni vaikeajaks on seatud 5 ms.
Integreerimisaja mõju on 4×4 ja 8×8 eraldusvõime puhul erinev. Eraldusvõime 4 × 4 koosneb ühest integreerimisajast ja eraldusvõime 8 × 8 koosneb neljast integreerimisajast. Järgmised arvud näitavad mõlema eraldusvõime VCSEL-i emissiooni.
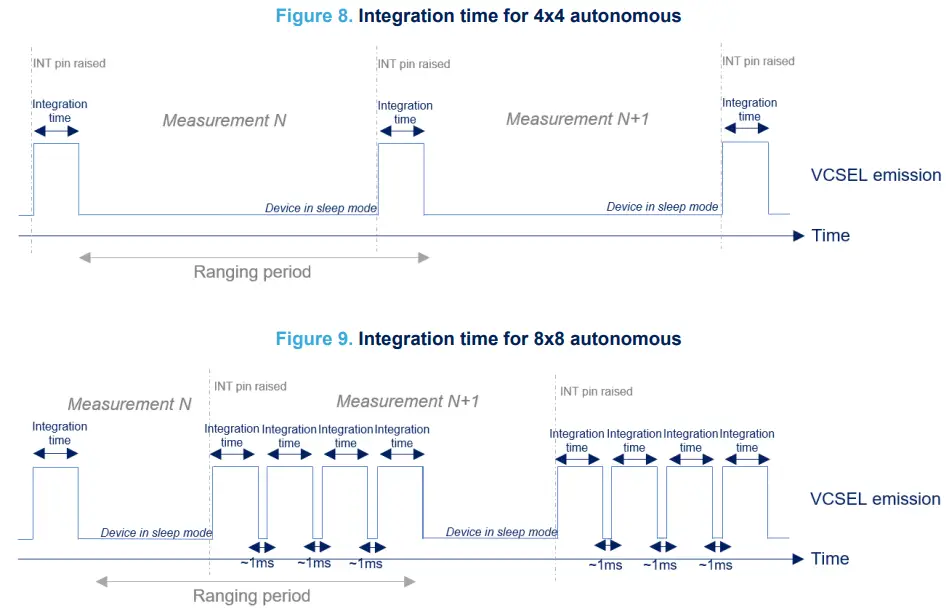
Kõikide integreerimisaegade summa + 1 ms lisakulu peab olema väiksem kui mõõtmisperiood. Vastasel juhul pikeneb vahemiku perioodi automaatselt.
Toiterežiimid
Toiterežiime saab kasutada energiatarbimise vähendamiseks, kui seadet ei kasutata. VL53L5CX saab töötada ühes järgmistest toiterežiimidest:
- Äratus: seade on seatud HP jõudeolekusse (suur võimsus) ja ootab juhiseid.
- Unerežiim: seade on seatud väikese energiatarbega olekusse LP (väike võimsus). Seadet ei saa kasutada enne, kui see on äratusrežiimis.
See režiim säilitab püsivara ja konfiguratsiooni.
Toiterežiimi saab muuta funktsiooni vl53l5cx_set_power_mode() abil. Vaikerežiim on äratus.
Märkus. Kui kasutaja soovib toiterežiimi muuta, ei tohi seade olla vahemiku määramise olekus.
Teritsioneer
Sihtmärgilt tagastatav signaal ei ole teravate servadega puhas impulss. Servad kalduvad eemale ja võivad mõjutada külgnevates tsoonides esitatud vahemaid. Teritajat kasutatakse osa või kogu signaali eemaldamiseks, mis on põhjustatud loorivalgusest.
EndineampJärgmisel joonisel kujutatud le kujutab lähedal asuvat sihtmärki 100 mm kaugusel FoV keskpunktist ja teist sihtmärki, mis asub kaugemal 500 mm kaugusel. Sõltuvalt teritaja väärtusest võib lähedane sihtmärk ilmuda tegelikust rohkemates tsoonides.
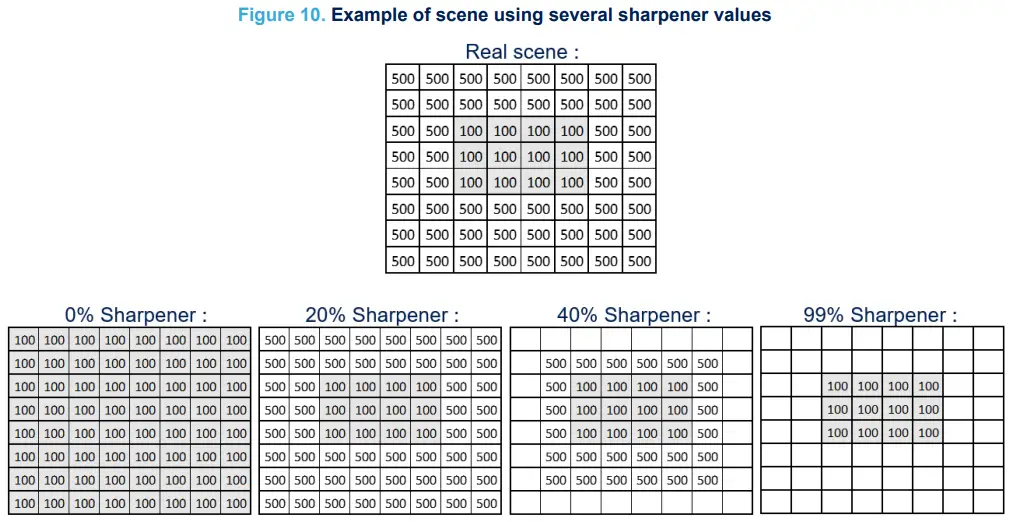
Teritajat saab muuta funktsiooni vl53l5cx_set_sharpener_percent() abil. Lubatud väärtused on vahemikus 0% kuni 99%. Vaikeväärtus on 5%.
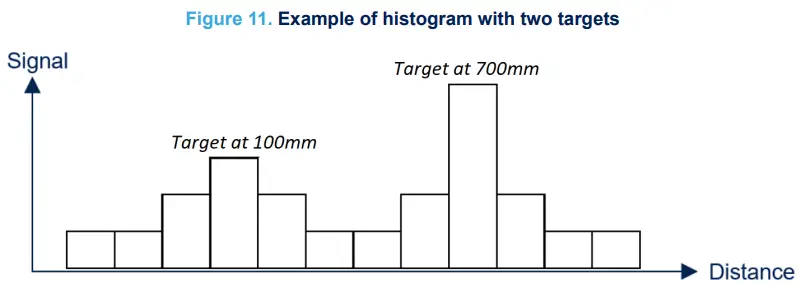
Sihtjärjestus
VL53L5CX suudab mõõta mitut sihtmärki tsooni kohta. Tänu histogrammi töötlemisele saab host valida teatatud sihtmärkide järjekorra. On kaks võimalust.
- Lähim: lähim sihtmärk on esimene teatatud
- Tugevaim: tugevaim sihtmärk on esimene, millest teatatakse
Sihtjärjestust saab muuta funktsiooni vl53l5cx_set_target_order() abil. Vaikimisi järjestus on Strongest.
Endineample kujutab järgmisel joonisel kahe sihtmärgi tuvastamist. Üks 100 mm madala peegeldusvõimega ja teine 700 mm kõrge peegeldusvõimega.
Mitu sihtmärki tsooni kohta
VL53L5CX suudab mõõta kuni nelja sihtmärki tsooni kohta. Kasutaja saab seadistada anduri poolt tagastatavate sihtmärkide arvu.
Märkus. Kahe tuvastatava sihtmärgi vaheline minimaalne kaugus on 600 mm.
Juhilt ei ole võimalik valida; seda tuleb teha saidil „Platform.h” file. Makro VL53L5CX_NB_ TARGET_PER_ZONE tuleb määrata väärtusele vahemikus 1 kuni 4. Sihtjärjestus, mida on kirjeldatud jaotises 4.9: Sihtjärjestus, mõjutab otseselt tuvastatud sihtmärgi järjekorda. Vaikimisi väljastab andur maksimaalselt ühe sihtmärgi tsooni kohta.
Märkus. Suurenenud sihtmärkide arv tsooni kohta suurendab vajalikku RAM-i mahtu
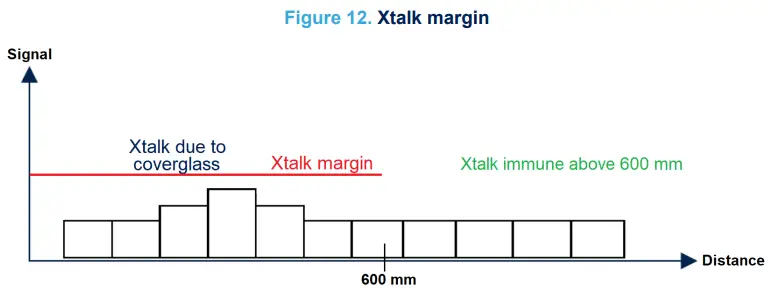
Xtalki marginaal
Xtalki veeris on lisafunktsioon, mis on saadaval ainult pistikprogrammi Xtalk abil. .c ja .f files 'vl53l5cx_plugin_xtalk' tuleb kasutada.
Veerist kasutatakse tuvastusläve muutmiseks, kui anduri ülaosas on katteklaas. Pärast ülekõnede kalibreerimisandmete seadistamist saab läve suurendada tagamaks, et katteklaasi kunagi ei tuvastata. NäiteksampKui kasutaja saab läbirääkimiste kalibreerimise teha ühes seadmes ja kasutada samu kalibreerimisandmeid kõigis teistes seadmetes. Xtalki veerist saab kasutada ülekõnede korrigeerimise häälestamiseks. Allolev joonis kujutab Xtalki marginaali.
Tuvastamisläved
Lisaks tavalistele kauguse määramise võimalustele saab anduri programmeerida tuvastama objekti teatud eelnevalt määratletud kriteeriumide alusel. See funktsioon on saadaval pistikprogrammi „tuvastusläved” abil, mis pole API-s vaikimisi lisatud. The filetuleb kasutada s nimega 'vl53l5cx_plugin_detection_thresholds'.
Seda funktsiooni saab kasutada viigu A3 (INT) katkestuse käivitamiseks, kui kasutaja määratud tingimused on täidetud. Võimalikud on kolm konfiguratsiooni:
- Eraldusvõime 4 × 4: ühe läve kasutamine tsooni kohta (kokku 16 läve)
- Eraldusvõime 4 × 4: kasutades kahte läve tsooni kohta (kokku 32 läve)
- Eraldusvõime 8 × 8: ühe läve kasutamine tsooni kohta (kokku 64 läve)
Olenemata kasutatavast konfiguratsioonist on lävede loomise protseduur ja RAM-i suurus samad. Iga läve kombinatsiooni jaoks tuleb täita mitu välja: - Tsooni ID: valitud tsooni ID (vt jaotist 2.2: Tõhus orientatsioon)
- Mõõtmine: püüdmise mõõtmine (kaugus, signaal, SPADide arv, …)
- Tüüp: mõõtaknad (akendes, akendest väljas, allpool madalat läve, …)
- Madal lävi: päästiku madala läve kasutaja. Kasutaja ei pea vormingut määrama, seda haldab automaatselt API.
- Kõrge lävi: päästiku kõrge läve kasutaja. Kasutajal pole vaja vormingut määrata; seda haldab automaatselt API.
- Matemaatiline tehe: kasutatakse ainult 4 × 4 – 2 läve kombinatsioonide jaoks tsooni kohta. Kasutaja saab määrata kombinatsiooni, kasutades ühes tsoonis mitut läve.
Liikumisnäidik
Anduril VL53L5CX on sisseehitatud püsivara funktsioon, mis võimaldab stseenis liikumist tuvastada. Liikumisnäidik arvutatakse järjestikuste kaadrite vahel. See valik on saadaval plugin'vl53l5cx_plugin_motion_indicator' abil.
Liikumisnäidik lähtestatakse funktsiooni vl53l5cx_motion_indicator_init() abil. Anduri eraldusvõime muutmiseks värskendage liikumisindikaatori eraldusvõimet spetsiaalse funktsiooni abil: vl53l5cx_motion_indicator_set_resolution().
Kasutaja võib liikumise tuvastamiseks muuta ka minimaalset ja maksimaalset kaugust. Minimaalse ja maksimaalse kauguse erinevus ei tohi olla suurem kui 1500 mm. Vaikimisi lähtestatakse kaugused väärtustega vahemikus 400 mm kuni 1500 mm.
Tulemused salvestatakse väljale 'motion_indicator'. Sellel väljal annab massiiv 'motion' väärtuse, mis sisaldab liikumise intensiivsust tsooni kohta. Kõrge väärtus näitab suurt liikumisvariatsiooni kaadrite vahel. Tüüpiline liikumine annab väärtuse vahemikus 100 kuni 500. See tundlikkus sõltub integreerimisajast, sihtmärgi kaugusest ja sihtmärgi peegeldusest.
Ideaalne kombinatsioon väikese võimsusega rakenduste jaoks on liikumisindikaatori kasutamine koos autonoomse kauguse määramise režiimiga ja liikumisele programmeeritud tuvastusläved. See võimaldab minimaalse energiatarbimisega tuvastada FoV liikumise variatsioone.
Perioodiline temperatuuri kompenseerimine
Vahemiku jõudlust mõjutavad temperatuurikõikumised. Andur VL53L5CX sisaldab temperatuuri kompensatsiooni, mis kalibreeritakse üks kord voogesituse alustamisel. Kui aga temperatuur muutub, ei pruugi kompensatsioon olla uue temperatuuriga joondatud. Selle probleemi vältimiseks saab klient automaatse VHV abil perioodiliselt temperatuuri kompenseerida. Perioodiline temperatuuri kalibreerimine võtab aega mõne millisekundi. Kasutaja saab perioodi määrata.
Selle funktsiooni kasutamiseks peab klient:
• Kutsuge funktsioon vl53l5cx_set_VHV_repeat_count().
• Seejärel esitage argumendiks kaadrite arv iga uue kalibreerimise vahel.
Kui argument on 0, on kompensatsioon keelatud.
Range tulemused
Saadaolevad andmed
Ulatuslik siht- ja keskkonnaandmete loend võidakse väljastada kaugustegevuse käigus. Järgmine tabel kirjeldab kasutajale saadaolevaid parameetreid.
Tabel 3. Saadaval väljund, kasutades andurit VL53L5CX
| Element | Nb baiti (RAM) | Üksus | Kirjeldus |
| Ambient / SPAD | 256 | Kcps/SPAD | Ümbritseva sageduse mõõtmine SPAD-massiivil ilma aktiivse footonite emissioonita, et mõõta mürast tingitud ümbritseva signaali kiirust. |
| Tuvastatud sihtmärkide arv | 64 | Mitte ühtegi | Praeguses tsoonis tuvastatud sihtmärkide arv. See väärtus peaks olema esimene, mis kontrollib mõõtmise kehtivust. |
| Lubatud SPAD-ide arv | 256 | Mitte ühtegi | Praeguse mõõtmise jaoks lubatud SPAD-de arv. Kaugel või madalal peegelduv sihtmärk aktiveerib rohkem SPAD-sid. |
| Signaal SPAD kohta | Programmeeritud 256 x nb sihtmärki | Kcps/SPAD | VCSEL-i impulsi ajal mõõdetud footonite kogus. |
| Vahemiku sigma | Programmeeritud 128 x nb sihtmärki | Millimeeter | Sigma hindaja müra jaoks teatatud sihtkaugusel. |
| Kaugus | Programmeeritud 128 x nb sihtmärki | Millimeeter | Sihtkaugus |
| Sihtseisund | Programmeeritud 64 x nb sihtmärki | Mitte ühtegi | Mõõtmiste kehtivus. Vaata 5.5. jagu: tulemused tõlgendus lisateabe saamiseks. |
| Peegeldus | 64 x arv sihtmärke programmeeritud | protsenti | Hinnanguline sihtpeegeldus protsentides |
| Liikumisnäidik | 140 | Mitte ühtegi | Liikumisindikaatori tulemusi sisaldav struktuur. Väli 'liikumine' sisaldab liikumise intensiivsust. |
Märkus. Mitme elemendi (signaal per spad, sigma, …) puhul on juurdepääs andmetele erinev, kui kasutaja on programmeerinud rohkem kui ühe sihtmärgi tsooni kohta (vt jaotis 4.10: Mitu sihtmärki tsooni kohta). Vaata ntample koodid lisateabe saamiseks.
Kohandage väljundi valikut
Vaikimisi on kõik VL53L5CX väljundid lubatud. Vajadusel saab kasutaja mõne anduri väljundi keelata.
Mõõtmiste keelamine pole juhil saadaval; seda tuleb teha platvormil Platform.h file. Kasutaja saab väljundite keelamiseks deklareerida järgmised makrod:
#define VL53L5CX_DISABLE_AMBIENT_PER_SPAD
#define VL53L5CX_DISABLE_NB_SPADS_ENABLED
#define VL53L5CX_DISABLE_NB_TARGET_DETECTED
#define VL53L5CX_DISABLE_SIGNAL_PER_SPAD
#define VL53L5CX_DISABLE_RANGE_SIGMA_MM
#define VL53L5CX_DISABLE_DISTANCE_MM
#define VL53L5CX_DISABLE_TARGET_STATUS
#define VL53L5CX_DISABLE_REFLECTANCE_PERCENT
#define VL53L5CX_DISABLE_MOTION_INDICATOR
Järelikult ei deklareerita välju tulemuste struktuuris ja andmeid ei edastata hostile. RAM-i suurust ja I²C suurust on vähendatud.
Andmete järjepidevuse tagamiseks soovitab ST alati 'tuvastatud sihtmärkide arv' ja 'sihtmärgi olek' sisse lülitatud hoida. See filtreerib mõõtmised sõltuvalt sihtmärgi olekust (vt jaotist 5.5: Tulemuste tõlgendamine).
Kaugete tulemuste saamine
Vahemaa määramise seansi ajal on kaks võimalust teada saada, kas uued vahemikuandmed on saadaval.
- Pollimisrežiim: kasutab pidevalt funktsiooni vl53l5cx_check_data_ready(). See tuvastab anduri tagastatud uue voogude arvu.
- Katkestusrežiim: ootab kontaktil A3 (GPIO1) tõstetud katkestust. Katkestus kustutatakse automaatselt ~100 μs pärast.
Kui uued andmed on valmis, saab tulemusi lugeda funktsiooni vl53l5cx_get_ranging_data() abil. See tagastab värskendatud struktuuri, mis sisaldab kogu valitud väljundit. Kuna seade on asünkroonne, pole kauguse määramise seansi jätkamiseks vaja katkestada.
See funktsioon on saadaval nii pideva kui ka autonoomse kauguse määramise režiimide jaoks.
Toores püsivara vormingu kasutamine
Pärast vahemikuandmete edastamist I²C kaudu toimub püsivara vormingu ja hostivormingu vaheline teisendus. Seda toimingut tehakse tavaliselt selleks, et anduri vaikeväljundiks oleks kaugus millimeetrites. Kui kasutaja soovib kasutada püsivara vormingut, tuleb platvormil määratleda järgmine makro file: VL53L5CX
#define VL53L5CX_USE_RAW_FORMAT
Tulemuste tõlgendamine
VL53L5CX tagastatud andmeid saab sihtoleku oleku arvessevõtmiseks filtreerida. Olek näitab mõõtmise kehtivust. Täielikku olekuloendit kirjeldatakse järgmises tabelis.
Tabel 4. Saadaolevate sihtmärkide olekute loend
| Sihtseisund | Kirjeldus |
| 0 | Vahemikuandmeid ei värskendata |
| 1 | Signaalikiirus liiga madal SPAD-massiivis |
| 2 | Sihtfaasis |
| 3 | Sigma hindaja on liiga kõrge |
| 4 | Eesmärgi järjepidevus ebaõnnestus |
| 5 | Vahemik kehtib |
| 6 | Mähkimist ei teostata (tavaliselt esimene vahemik) |
| 7 | Hinda järjepidevus ebaõnnestus |
| 8 | Signaalikiirus on praeguse eesmärgi jaoks liiga madal |
| 9 | Vahemik, mis kehtib suure impulsi korral (võib olla tingitud liidetud sihtmärgist) |
| 10 | Vahemik on kehtiv, kuid eelmises vahemikus sihtmärki ei tuvastatud |
| 11 | Mõõtmise järjepidevus ebaõnnestus |
| 12 | Sihtmärk on teritaja tõttu teise poolt hägune |
| 13 | Sihtmärk tuvastati, kuid andmed on vastuolulised. See juhtub sageli sekundaarsete sihtmärkide puhul. |
| 255 | Sihtmärki ei tuvastatud (ainult siis, kui tuvastatud sihtmärkide arv on lubatud) |
Ühtsete andmete saamiseks peab kasutaja kehtetu sihtmärgi oleku filtreerima. Usaldushinnangu andmiseks loetakse olekuga 5 sihtmärk 100% kehtivaks. Olekut 6 või 9 võib pidada 50% usaldusväärtusega. Kõik muud olekud on alla 50% usaldustaseme.
Juhi vead
Kui anduri VL53L5CX kasutamisel ilmneb tõrge, tagastab draiver konkreetse vea. Järgmises tabelis on loetletud võimalikud vead.
Tabel 5. Draiveri kasutamisel saadaolevate vigade loend
| Sihtseisund | Kirjeldus |
| 0 | Pole viga |
|
127 |
Kasutaja programmeeris vale seadistuse
(tundmatu eraldusvõime, vahemiku sagedus liiga kõrge, …) |
| 255 | Peamine viga. Tavaliselt on aegumisviga I²C vea tõttu. |
| muud | Mitme eespool kirjeldatud vea kombinatsioon |
Märkus. Host saab platvormi kasutades rakendada rohkem veakoode files.
Läbivaatamise ajalugu
Tabel 6. Dokumendi läbivaatamise ajalugu
| Kuupäev | Versioon | Muudatused |
| 21. juuni 2021 | 1 | Esialgne vabastamine |
| 30. august 2021 | 2 | Lisatud Jaotis 5.4: Toores püsivara vormingu kasutamine
Lisatud uus sihtmärk 13 tolli Tabel 4. Saadaolevate sihtmärkide olekute loend |
| 05-2022-XNUMX | 3 | Lisatud märkus sihtmärkide minimaalse minimaalse kauguse kohta Jaotis 4.10: Mitu sihtmärki tsoonis |
| 10. august 2023 | 4 | Muudetud Joonis 11. Näideampkahe sihtmärgiga histogrammi le |
| 21. veebruar 2024 | 5 | Lisatud VHV (väga kõrge voltage) kuni 1. jagu: Akronüümid ja lühendid. Lisatud Jaotis 4.14: Perioodiline temperatuurikompensatsioon |
TÄHTIS MÄRKUS – LUGEGE HOOLIKAS
STMicroelectronics NV ja selle tütarettevõtted („ST”) jätavad endale õiguse teha ST-toodetes ja/või selles dokumendis igal ajal ilma ette teatamata muudatusi, parandusi, täiendusi, modifikatsioone ja täiendusi. Ostjad peaksid enne tellimuste esitamist hankima uusima asjakohase teabe ST-toodete kohta. ST tooteid müüakse vastavalt ST müügitingimustele, mis kehtisid tellimuse kinnitamise ajal.
Ostjad vastutavad ainuisikuliselt ST-toodete valiku, valiku ja kasutamise eest ning ST ei vastuta rakendusabi ega ostjate toodete disaini eest.
ST ei anna siinkohal mingit otsest ega kaudset litsentsi ühelegi intellektuaalomandi õigusele.
ST-toodete edasimüük, mille sätted erinevad siin esitatud teabest, tühistab ST-i antud tootele antud garantii.
ST ja ST logo on ST kaubamärgid. ST-kaubamärkide kohta lisateabe saamiseks vaadake www.st.com/trademarks. Kõik muud toote- või teenusenimed kuuluvad nende vastavatele omanikele.
Selles dokumendis sisalduv teave asendab ja asendab selle dokumendi varasemates versioonides esitatud teabe.
© 2024 STMicroelectronics – kõik õigused kaitstud

Dokumendid / Ressursid
 |
STMicroelectronics VL53L5CX mitmetsooniline lennuaja kaugusandur [pdfKasutusjuhend VL53L5CX mitmetsooniline lennuaja kaugusandur, VL53L5CX, mitmetsooniline lennuaja kaugusandur, lennuaja kaugusandur, lennuulatuse andur, kauguse andur, andur |



